31256094
Descripción
Mapa Mental por Valentina Ya nez, actualizado hace más de 1 año
|
|
Creado por Valentina Ya nez
hace más de 4 años
|
|
Controladores Lógicos Programables
(PLC)
- DEFINICIÓN E HISTORIA DE PLC
- Un controlador lógico programable, PLC (Programmable Logic Controller), se trata de
una computadora, utilizada en la ingeniería de automatización industrial, para
automatizar procesos electromecánicos, tales como el control de la maquinaria de la
fábrica en líneas de montaje o atracciones mecánicas.
- Instrumento electrónico, que utiliza memoria programable para guardar instrucciones sobre la
implementación de determinadas funciones, como operaciones lógicas, secuencias de acciones,
especificaciones temporales, contadores y cálculos para el control mediante módulos de E/S
analógicos o digitales sobre diferentes tipos de máquinas y de procesos
- Instrumento electrónico, que utiliza memoria programable para guardar instrucciones sobre la
implementación de determinadas funciones, como operaciones lógicas, secuencias de acciones,
especificaciones temporales, contadores y cálculos para el control mediante módulos de E/S
analógicos o digitales sobre diferentes tipos de máquinas y de procesos
- El desarrollo de los PLCs fue dirigido originalmente por los requerimientos de los fabricantes de
automóviles. Estos cambiaban constantemente los sistemas de control en sus líneas de producción
de modo que necesitaban un modo más económico para realizarlo puesto que, en el pasado, esto
requería un extenso re-alambrado de bancos de relevadores.
- En 1968 aparecieron los primeros autómatas programables. La compañía americana Bedford
Associates sugirió así un Controlador Modular Digital (MODICON) para su utilización en una
compañía de automoción y MODICON 084 fue el primer PLC con una aplicación industrial.
- A principios de los 70, los PLC ya incorporaban el microprocesador. En 1973 aparecieron los PLCs con la
capacidad de comunicación. De este modo, los PLCs eran capaces de intercambiar información entre
ellos y podían situarse lejos de los procesadores y los objetos que iban a controlar. Así se incorporaron
también más prestaciones como manipulación de datos, cálculos matemáticos, elementos de
comunicación hombre-máquina, etc. A mediados de los años 70 – apareció la tecnología PLC, basada en
microprocesadores bit-slice. Además, se realizaron mejoras como el aumento de su memoria; la
posibilidad de tener entradas/salidas remotas tanto analógicas como numéricas, funciones de control
de posicionamiento; aparición de lenguajes con mayor número de funciones y más potentes; y el
aumento del desarrollo de las comunicaciones con periféricos y ordenadores.
- Fue en los año 80 cuando se produjo un intento de estandarización de las comunicaciones con el
protocolo MAP (Manufacturing Automation Protocol) de General Motor’s. en la década de los 80 se
mejoraron las prestaciones de los PLCs referidas a: velocidad de respuesta, reducción de las
dimensiones, concentración del número de entradas/salidas en los respectivos módulos, desarrollo
de módulos de control continuo, PID, servo controladores, control inteligente y fuzzy.
- Hoy en día disponemos de PLCs que pueden ser programados en diagramas de bloques, listas de
instrucciones o incluso texto estructurado al mismo tiempo
- Hoy en día disponemos de PLCs que pueden ser programados en diagramas de bloques, listas de
instrucciones o incluso texto estructurado al mismo tiempo
- Fue en los año 80 cuando se produjo un intento de estandarización de las comunicaciones con el
protocolo MAP (Manufacturing Automation Protocol) de General Motor’s. en la década de los 80 se
mejoraron las prestaciones de los PLCs referidas a: velocidad de respuesta, reducción de las
dimensiones, concentración del número de entradas/salidas en los respectivos módulos, desarrollo
de módulos de control continuo, PID, servo controladores, control inteligente y fuzzy.
- A principios de los 70, los PLC ya incorporaban el microprocesador. En 1973 aparecieron los PLCs con la
capacidad de comunicación. De este modo, los PLCs eran capaces de intercambiar información entre
ellos y podían situarse lejos de los procesadores y los objetos que iban a controlar. Así se incorporaron
también más prestaciones como manipulación de datos, cálculos matemáticos, elementos de
comunicación hombre-máquina, etc. A mediados de los años 70 – apareció la tecnología PLC, basada en
microprocesadores bit-slice. Además, se realizaron mejoras como el aumento de su memoria; la
posibilidad de tener entradas/salidas remotas tanto analógicas como numéricas, funciones de control
de posicionamiento; aparición de lenguajes con mayor número de funciones y más potentes; y el
aumento del desarrollo de las comunicaciones con periféricos y ordenadores.
- En 1968 aparecieron los primeros autómatas programables. La compañía americana Bedford
Associates sugirió así un Controlador Modular Digital (MODICON) para su utilización en una
compañía de automoción y MODICON 084 fue el primer PLC con una aplicación industrial.
- Un controlador lógico programable, PLC (Programmable Logic Controller), se trata de
una computadora, utilizada en la ingeniería de automatización industrial, para
automatizar procesos electromecánicos, tales como el control de la maquinaria de la
fábrica en líneas de montaje o atracciones mecánicas.
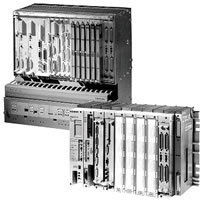
- COMPONENTES DE HARDWARE
- • Módulo de interfaz (IM), conecta diferentes casetes individuales con un único PLC. • Módulo
funcional (FM), procesamiento complejo en tiempo-crítico de procesos independientes de la
CPU. • Regulador PID o control de la posición. • Procesador de la comunicación (CP), conecta el
PLC en una red de trabajo industrial. • Interfaz hombre-máquina (HMI). • Entradas/salidas
remotas. • Módulos de señal de alta-velocidad. • Cada módulo de PLC module tiene su propia
interfaz-HIM básica, utilizada para la visualización de los errores y las condiciones de
comunicación, la batería, entradas/salidas, operación de los PLC, etc. Pequeños displays con
cristal líquido (LCD) o diodos emisores de luz (LED) se utilizan para la interfaz-HMI.
- • Módulo de interfaz (IM), conecta diferentes casetes individuales con un único PLC. • Módulo
funcional (FM), procesamiento complejo en tiempo-crítico de procesos independientes de la
CPU. • Regulador PID o control de la posición. • Procesador de la comunicación (CP), conecta el
PLC en una red de trabajo industrial. • Interfaz hombre-máquina (HMI). • Entradas/salidas
remotas. • Módulos de señal de alta-velocidad. • Cada módulo de PLC module tiene su propia
interfaz-HIM básica, utilizada para la visualización de los errores y las condiciones de
comunicación, la batería, entradas/salidas, operación de los PLC, etc. Pequeños displays con
cristal líquido (LCD) o diodos emisores de luz (LED) se utilizan para la interfaz-HMI.
- TIPOS DE PLC
- PLC compactos
- Son aquellos que incorporan CPU, PS, módulos de entrada y salida en un único
paquete. A menudo existe un número fijo de E/Ss digitales, una o dos canales de
comunicación (para programar el PLC y la conexión de los buses de campo) y
HMI
- Son aquellos que incorporan CPU, PS, módulos de entrada y salida en un único
paquete. A menudo existe un número fijo de E/Ss digitales, una o dos canales de
comunicación (para programar el PLC y la conexión de los buses de campo) y
HMI
- PLC modular
- Pueden utilizar un elevado número de entradas/salidas, pueden soportar programas más grandes,
guardar más datos y operar bajo el modo de multitarea. Normalmente se utilizan para el control,
regulación, posicionamiento, procesamiento de datos, manipulación, comunicación, monitorización,
servicios-web, etc.
- Pueden utilizar un elevado número de entradas/salidas, pueden soportar programas más grandes,
guardar más datos y operar bajo el modo de multitarea. Normalmente se utilizan para el control,
regulación, posicionamiento, procesamiento de datos, manipulación, comunicación, monitorización,
servicios-web, etc.
- PLC de tipo montaje en rack
- Contiene ranuras para los módulos y un sistema de bus integrado para intercambiar información
entre los diferentes módulos. La ventaja principal es que pueden permitir un intercambio más rápido
de los datos entre los módulos y el tiempo de reacción por parte de los módulos es menor.
- Contiene ranuras para los módulos y un sistema de bus integrado para intercambiar información
entre los diferentes módulos. La ventaja principal es que pueden permitir un intercambio más rápido
de los datos entre los módulos y el tiempo de reacción por parte de los módulos es menor.
- PLC con panel Operador y Controlador Lógico Programable (OPLC)
- Posee una interfaz HIM para su funcionamiento y una monitorización de los procesos automáticos y
las máquinas. La HMI consiste principalmente en un monitor y un teclado o una pantalla táctil. La
ventaja principal de este sistema respecto a un PLC con un panel operador aparte es que no es
necesario programar el panel de forma separada. Toda la programación se realiza por medio de una
herramienta software, lo que permite economizar los gastos del desarrollo del sistema.
- Posee una interfaz HIM para su funcionamiento y una monitorización de los procesos automáticos y
las máquinas. La HMI consiste principalmente en un monitor y un teclado o una pantalla táctil. La
ventaja principal de este sistema respecto a un PLC con un panel operador aparte es que no es
necesario programar el panel de forma separada. Toda la programación se realiza por medio de una
herramienta software, lo que permite economizar los gastos del desarrollo del sistema.
- Otros PLC
- Con ordenador industrial (PC industrial)
- Son aquellos que combina un PC normal y un PLC en un único sistema. La
parte de PLC puede estar basada en hardware (PLC de tipo slot) o basadas
en un PLC con software virtual (PLC de tipo software).
- Son aquellos que combina un PC normal y un PLC en un único sistema. La
parte de PLC puede estar basada en hardware (PLC de tipo slot) o basadas
en un PLC con software virtual (PLC de tipo software).
- PLC de tipo de ranura
- Se trata de una tarjeta especial, que posee todas las funciones de cualquier CPU de un PLC normal.
Se sitúa en el (en una ranura vacía de la placa base), que permite intercambiar directamente la
información entre las aplicaciones-HIM del PC existente y/u otras aplicaciones software.
- Se trata de una tarjeta especial, que posee todas las funciones de cualquier CPU de un PLC normal.
Se sitúa en el (en una ranura vacía de la placa base), que permite intercambiar directamente la
información entre las aplicaciones-HIM del PC existente y/u otras aplicaciones software.
- PLC de tipo software
- Se trata de un PLC virtual, que trabaja en un ordenador personal. Para controlar las máquinas o
procesos se utilizan los puertos de comunicación del PC (Ethernet, COM) o unas tarjetas especiales del
tipo del bus del sistema (que se sitúan en el PC) que permiten realizar una comunicación remota con las
entradas/salidas de otros dispositivos para la automatización.
- Se trata de un PLC virtual, que trabaja en un ordenador personal. Para controlar las máquinas o
procesos se utilizan los puertos de comunicación del PC (Ethernet, COM) o unas tarjetas especiales del
tipo del bus del sistema (que se sitúan en el PC) que permiten realizar una comunicación remota con las
entradas/salidas de otros dispositivos para la automatización.
- Con ordenador industrial (PC industrial)
- PLC compactos
- SEÑALES DE UN PLC
- Un PLC recibe y transfiere señales eléctricas, expresando así variables físicas finitas. De este modo es
necesario incluir en el SM un convertidor de señal para recibir y cambiar los valores a variables
físicas. Existen tres tipos de señales en un PLC: señales binarias, digitales y analógicas.
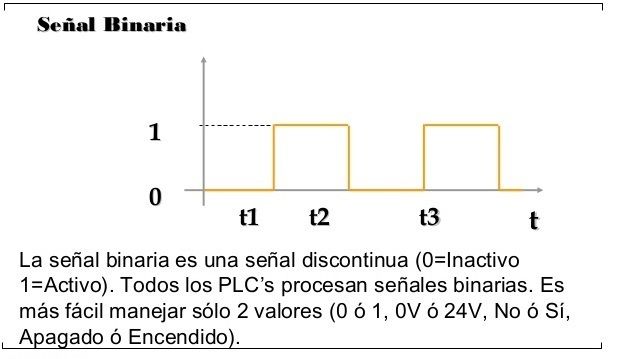
- Señales binarias, señal de un bit con dos valores posibles, que se codifican por medio de un
botón o un interruptor. Una activación, normalmente abre el contacto correspondiendo con el
valor lógico “1”, y una no-activación con el nivel lógico “0”. Los límites de tolerancia se definen
con interruptores sin contacto. Así el IEC 61131 define el rango de -3 - +5 V para el valor lógico
“0”, mientras que 11 - 30 V se definen como el valor lógico de “1” a 24 V DC.
- Señales digitales, se trata de una secuencia de señales binarias,
consideradas como una sola. Cada posición de la señal digital se denomina
un bit. Los formatos típicos de las señales digitales son: tetrad – 4 bits, byte
– 8 bits, word – 16 bits, double word – 32 bits, double long word – 64 bits
- Señales analógicas, son aquellas que poseen valores continuos, es decir, consisten en
un número infinito de valores. Hoy en día, los PLCs no pueden procesar señales
analógicas reales. De este modo, estas señales deben ser convertidas en señales
digitales y viceversa. Esta conversión se realiza por medio de SMs analógicos, que
contienen ADC.
- Señales binarias, señal de un bit con dos valores posibles, que se codifican por medio de un
botón o un interruptor. Una activación, normalmente abre el contacto correspondiendo con el
valor lógico “1”, y una no-activación con el nivel lógico “0”. Los límites de tolerancia se definen
con interruptores sin contacto. Así el IEC 61131 define el rango de -3 - +5 V para el valor lógico
“0”, mientras que 11 - 30 V se definen como el valor lógico de “1” a 24 V DC.
- Un PLC recibe y transfiere señales eléctricas, expresando así variables físicas finitas. De este modo es
necesario incluir en el SM un convertidor de señal para recibir y cambiar los valores a variables
físicas. Existen tres tipos de señales en un PLC: señales binarias, digitales y analógicas.
- FUNCIONAMIENTO DE UN PLC
- La función que tiene un PLC es detectar diversos tipos de señales del proceso, elaborar y enviar
acciones de acuerdo a lo que se ha programado. Además, recibe configuraciones de los operadores y
da reporte a los mismos, aceptando modificaciones de programación cuando son necesarias.
- Cada ciclo comienza con un trabajo interno de
mantenimiento del PLC como el control de memoria,
diagnostico etc. Esta parte del ciclo se ejecuta muy
rápidamente de modo que el usuario no lo perciba
- El siguiente paso es la actualización de las entradas. Las condiciones de la
entrada de los SMs se leen y convierten en señales binarias o digitales. Estas
señales se envían a la CPU y se guardan en los datos de la memoria.
- Después, la CPU ejecute el programa del usuario, el cual ha sido
cargado secuencialmente en la memoria. Durante la ejecución
del programa se generan nuevas señales de salida.
- El último paso es la actualización de las salidas. Tras la ejecución de la última parte del
programa, las señales de salida se envían a la SM desde los datos de la memoria. Estas
señales son entonces convertidas en las señales apropiadas para las señales de los
actuadores. Al final de cada ciclo el PLC comienza un ciclo nuevo.
- El último paso es la actualización de las salidas. Tras la ejecución de la última parte del
programa, las señales de salida se envían a la SM desde los datos de la memoria. Estas
señales son entonces convertidas en las señales apropiadas para las señales de los
actuadores. Al final de cada ciclo el PLC comienza un ciclo nuevo.
- Después, la CPU ejecute el programa del usuario, el cual ha sido
cargado secuencialmente en la memoria. Durante la ejecución
del programa se generan nuevas señales de salida.
- El siguiente paso es la actualización de las entradas. Las condiciones de la
entrada de los SMs se leen y convierten en señales binarias o digitales. Estas
señales se envían a la CPU y se guardan en los datos de la memoria.
- Cada ciclo comienza con un trabajo interno de
mantenimiento del PLC como el control de memoria,
diagnostico etc. Esta parte del ciclo se ejecuta muy
rápidamente de modo que el usuario no lo perciba
- La función que tiene un PLC es detectar diversos tipos de señales del proceso, elaborar y enviar
acciones de acuerdo a lo que se ha programado. Además, recibe configuraciones de los operadores y
da reporte a los mismos, aceptando modificaciones de programación cuando son necesarias.
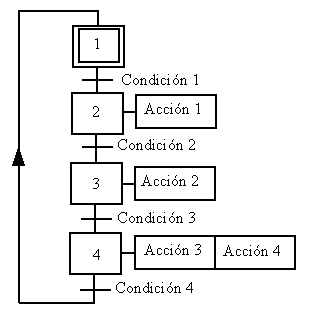
- METODOLOGÍA DE DISEÑO GRAFCET
- Está definido por unos elementos gráficos y unas reglas de evolución que
reflejan la dinámica del comportamiento del sistema. Todo automatismo
secuencial o concurrente se puede estructurar en una serie de etapas
que representan estados o subestados del sistema en los cuales se
realizan una o más acciones, así como transiciones, que son las
condiciones que deben darse para pasar de una etapa a otra. El Grafcet
es basicamente una representación gráfica del automatismo compuesto
por etapas y transiciones entre otros elementos:
- Etapa inicial: Indica el comienzo del esquema Grafcet
y se activa al poner en Run el autómata. Por lo
general suele haber una sola etapa de este tipo.
- Etapa: Su activación lleva consigo
una acción o una espera.
- Unión: Se utilizan para unir
entre sí varias etapas.
- Transición: Condición para desactivarse la
etapa en curso y activarse la siguiente etapa.
Se indica con un trazo perpendicular a una
unión.
- Direccionamiento: Indica la activación de una u otra
etapa en función de la condición que se cumpla.
- Proceso simultáneo: Muestra la activación o
desactivación de varias etapas a la vez.
- Acciones asociadas: Acciones que se realizan al
activarse la etapa a la que pertenecen.
- Acciones asociadas: Acciones que se realizan al
activarse la etapa a la que pertenecen.
- Proceso simultáneo: Muestra la activación o
desactivación de varias etapas a la vez.
- Direccionamiento: Indica la activación de una u otra
etapa en función de la condición que se cumpla.
- Transición: Condición para desactivarse la
etapa en curso y activarse la siguiente etapa.
Se indica con un trazo perpendicular a una
unión.
- Unión: Se utilizan para unir
entre sí varias etapas.
- Etapa: Su activación lleva consigo
una acción o una espera.
- Etapa inicial: Indica el comienzo del esquema Grafcet
y se activa al poner en Run el autómata. Por lo
general suele haber una sola etapa de este tipo.
- Está definido por unos elementos gráficos y unas reglas de evolución que
reflejan la dinámica del comportamiento del sistema. Todo automatismo
secuencial o concurrente se puede estructurar en una serie de etapas
que representan estados o subestados del sistema en los cuales se
realizan una o más acciones, así como transiciones, que son las
condiciones que deben darse para pasar de una etapa a otra. El Grafcet
es basicamente una representación gráfica del automatismo compuesto
por etapas y transiciones entre otros elementos:
- ÁLGEBRA DE BOOLE
- Es una estructura algebraica que
esquematiza las operaciones lógicas. En la
actualidad, se aplica de forma generalizada
en el ámbito del diseño electrónico. Esta
lógica se puede aplicar a dos campos.
- 1. Al análisis, porque es una forma concreta
de describir cómo funcionan los circuitos.
- 2. Al diseño, ya que teniendo una función lógica aplicamos dicho
álgebra para poder desarrollar una implementación de la
función.
- 1. Al análisis, porque es una forma concreta
de describir cómo funcionan los circuitos.
- Es una estructura algebraica que
esquematiza las operaciones lógicas. En la
actualidad, se aplica de forma generalizada
en el ámbito del diseño electrónico. Esta
lógica se puede aplicar a dos campos.
- LENGUAJES DE PROGRAMACIÓN, PARTES
Y COMPONENTES DE UN PLC.
- LENGUAJES DE PROGRAMACIÓN EN PLC
- Los lenguajes de programación en PLC se componen de
una serie de símbolos, caracteres y reglas de uso que
fueron diseñados para poder establecer una
comunicación de los usuarios con las máquinas. Es el
código mediante el cual somos capaces de crear un
programa con instrucciones para controlar el
funcionamiento de cualquier proceso o máquina
industrial. En la actualidad, el estándar internacional
IEC 6131 define los principales lenguajes de
programación en PLC:
- 1 – IL (Instruction List): Es un lenguaje de texto y es el lenguaje de
programación más antiguo. En realidad, es la base del resto de
lenguajes y se empleaba cuando las computadoras no tenían
capacidad gráfica. El IL es un lenguaje de bajo nivel y recuerda al
lenguaje ensamblador. En este lenguaje todos los programas pueden
ser traducidos a una lista de instrucciones. El control del programa
se consigue a través de “saltos” y de llamadas a funciones.
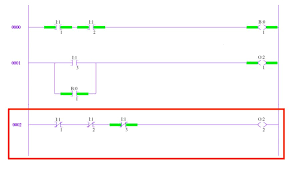
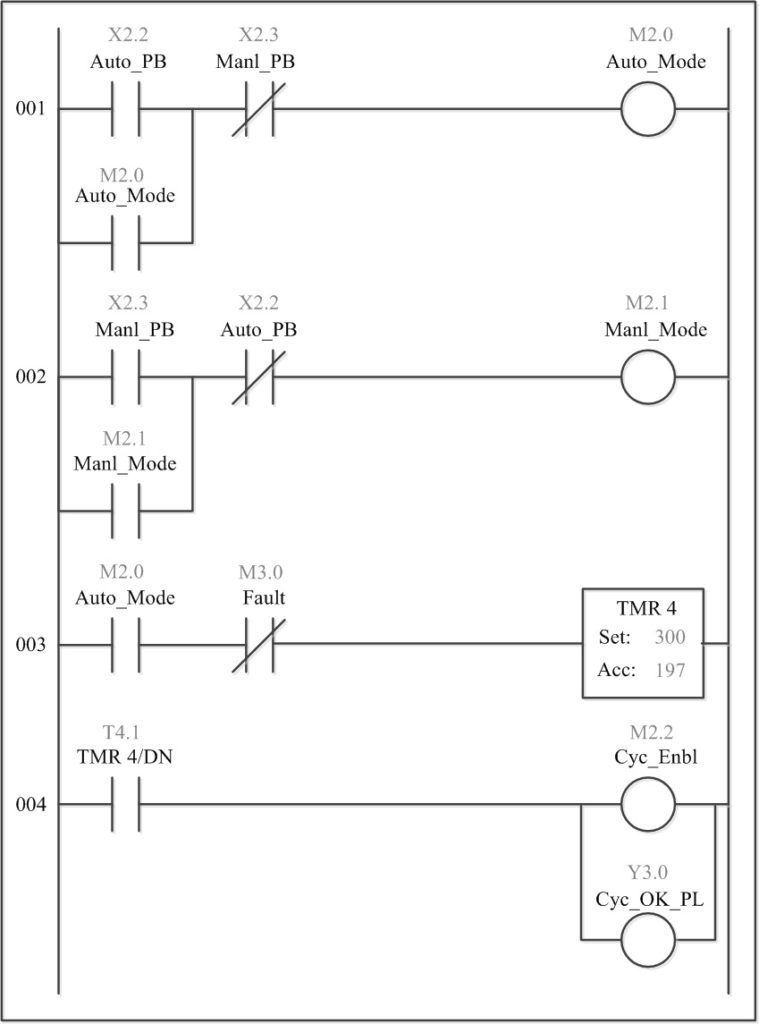
- 2 – LD (Ladder): Es un lenguaje gráfico y es la evolución del lenguaje IL. El lenguaje Ladder
se conoce también como Diagrama de Escalera, ya que su estructura recuerda a la de una
escalera: se compone de dos niveles verticales (alimentación) y de dos horizontales. Las
instrucciones se colocan en el lado izquierdo y las salidas en el lado derecho. El
procesador del PLC interpretará los lados de abajo arriba y de izquierda a derecha.
- 3 – FBD (Function Block Diagram): Es un lenguaje gráfico que
define la función entre las variables de entrada y las de salida.
En este lenguaje se utilizan bloques de símbolo lógico.
- 4 – ST (Structured Text): Es un lenguaje gráfico que define la
función entre las variables de entrada y las de salida. Recuerda
al lenguaje de programación C y al Pascal. Se compone de una
serie de instrucciones que se pueden ejecutar de manera
condicionada.
- 4 – ST (Structured Text): Es un lenguaje gráfico que define la
función entre las variables de entrada y las de salida. Recuerda
al lenguaje de programación C y al Pascal. Se compone de una
serie de instrucciones que se pueden ejecutar de manera
condicionada.
- 3 – FBD (Function Block Diagram): Es un lenguaje gráfico que
define la función entre las variables de entrada y las de salida.
En este lenguaje se utilizan bloques de símbolo lógico.
- 2 – LD (Ladder): Es un lenguaje gráfico y es la evolución del lenguaje IL. El lenguaje Ladder
se conoce también como Diagrama de Escalera, ya que su estructura recuerda a la de una
escalera: se compone de dos niveles verticales (alimentación) y de dos horizontales. Las
instrucciones se colocan en el lado izquierdo y las salidas en el lado derecho. El
procesador del PLC interpretará los lados de abajo arriba y de izquierda a derecha.
- 1 – IL (Instruction List): Es un lenguaje de texto y es el lenguaje de
programación más antiguo. En realidad, es la base del resto de
lenguajes y se empleaba cuando las computadoras no tenían
capacidad gráfica. El IL es un lenguaje de bajo nivel y recuerda al
lenguaje ensamblador. En este lenguaje todos los programas pueden
ser traducidos a una lista de instrucciones. El control del programa
se consigue a través de “saltos” y de llamadas a funciones.
- Los lenguajes de programación en PLC se componen de
una serie de símbolos, caracteres y reglas de uso que
fueron diseñados para poder establecer una
comunicación de los usuarios con las máquinas. Es el
código mediante el cual somos capaces de crear un
programa con instrucciones para controlar el
funcionamiento de cualquier proceso o máquina
industrial. En la actualidad, el estándar internacional
IEC 6131 define los principales lenguajes de
programación en PLC:
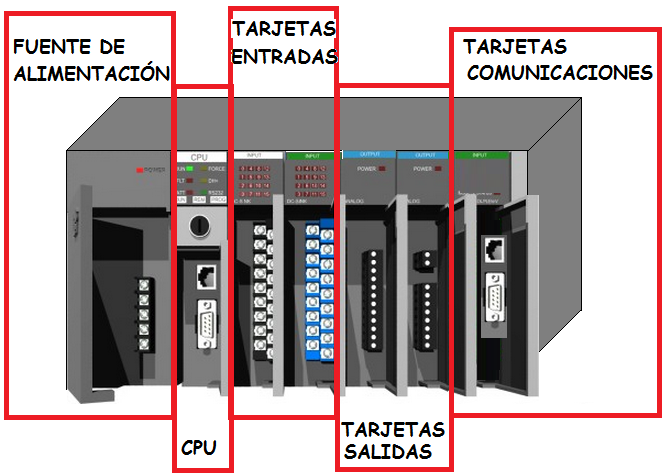
- PARTES DE UN PLC
- Fuente de alimentación: Es quien
brinda energía eléctrica al CPU,
así como a las tarjetas del PLC.
- CPU: La Unidad de Procesamiento Central es quien
decodifica la programación del PLC, por lo que permite
el funcionamiento de la computadora al realizar la
interpretación de los códigos.
- Módulos de entradas/salidas: Son los anexos
entre el CPU y el mecanismo a controlar. El de
entrada se ocupa de retroalimentar al PLC
para el correcto procesamiento de
información. El de salida envía una respuesta
luego de esta retroalimentación, directo a los
actuadores para el control del proceso.
- Módulo de memorias: Es donde se almacena
el software del PLC. La memoria puede ser de
tipo RAM, ROM, o PROM, entre otras.
- Módulo de memorias: Es donde se almacena
el software del PLC. La memoria puede ser de
tipo RAM, ROM, o PROM, entre otras.
- Módulos de entradas/salidas: Son los anexos
entre el CPU y el mecanismo a controlar. El de
entrada se ocupa de retroalimentar al PLC
para el correcto procesamiento de
información. El de salida envía una respuesta
luego de esta retroalimentación, directo a los
actuadores para el control del proceso.
- CPU: La Unidad de Procesamiento Central es quien
decodifica la programación del PLC, por lo que permite
el funcionamiento de la computadora al realizar la
interpretación de los códigos.
- Fuente de alimentación: Es quien
brinda energía eléctrica al CPU,
así como a las tarjetas del PLC.
- COMPONENTES DE UN
PLC
- Los controladores programables han crecido en todas las
aplicaciones de control industrial debido a la comodidad que
ofrecen para su puesta en marcha: facilidad de programación,
facilidad de cableado, facilidad de instalación y facilidad de
cambio. Los PLC abarcan una amplia gama de tamaños, pero
todos contienen seis componentes básicos:
- • Unidad central de procesamiento. • Rack. • Ensamblaje de
entrada. • Conjunto de salida. • Fuente de alimentación.
• Unidad de programación, dispositivo o PC/software.
- • Unidad central de procesamiento. • Rack. • Ensamblaje de
entrada. • Conjunto de salida. • Fuente de alimentación.
• Unidad de programación, dispositivo o PC/software.
- Los controladores programables han crecido en todas las
aplicaciones de control industrial debido a la comodidad que
ofrecen para su puesta en marcha: facilidad de programación,
facilidad de cableado, facilidad de instalación y facilidad de
cambio. Los PLC abarcan una amplia gama de tamaños, pero
todos contienen seis componentes básicos:
- LENGUAJES DE PROGRAMACIÓN EN PLC
- DIAGRAMA DE CONTACTOS.
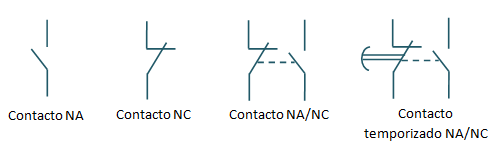
- Un contacto eléctrico es un componente del circuito eléctrico que
se encuentra en interruptores eléctricos y relés. Se compone de
dos piezas de metal eléctricamente conductoras por las que pasa
corriente eléctrica o no según se estén tocando o estén separadas.
- Los contactos pueden ser controlados por una persona mediante pulsadores e
interruptores, por presión mecánica en los interruptores y electromecánica en
los relés. Los materiales de los contactos suelen estar compuestos de
materiales muy buenos conductores de la electricidad, como la plata o el oro.
- Contacto tipo NA: Un contacto tipo normalmente abierto (tipo NA) es
un contacto que está abierto, es decir, "no deja pasar la corriente"
mientras el mismo, o el dispositivo que lo hace funcionar, se hallan en
un estado de espera o de reposo. Un ejemplo del uso de un contacto
"normalmente abierto" es el interruptor común de la luz de la casa.
- Contacto tipo NC Un contacto tipo normalmente cerrado (tipo NC) es un
contacto que está cerrado, es decir, "deja pasar la corriente" mientras el
mismo, o el dispositivo que lo hace funcionar, se hallan en un estado de
espera o de reposo. Un ejemplo del uso de un contacto "normalmente
cerrado" es el interruptor es el relé térmico de protección de un motor.
- Contacto tipo NA: Un contacto tipo normalmente abierto (tipo NA) es
un contacto que está abierto, es decir, "no deja pasar la corriente"
mientras el mismo, o el dispositivo que lo hace funcionar, se hallan en
un estado de espera o de reposo. Un ejemplo del uso de un contacto
"normalmente abierto" es el interruptor común de la luz de la casa.
- Los contactos pueden ser controlados por una persona mediante pulsadores e
interruptores, por presión mecánica en los interruptores y electromecánica en
los relés. Los materiales de los contactos suelen estar compuestos de
materiales muy buenos conductores de la electricidad, como la plata o el oro.
- Un contacto eléctrico es un componente del circuito eléctrico que
se encuentra en interruptores eléctricos y relés. Se compone de
dos piezas de metal eléctricamente conductoras por las que pasa
corriente eléctrica o no según se estén tocando o estén separadas.
- COMPUERTAS LÓGICAS NOT, AND Y OR
- Son circuitos electrónicos conformados internamente por transistores que se encuentran con
arreglos especiales con los que otorgan señales de voltaje como resultado o una salida de
forma booleana, están obtenidos por operaciones lógicas binarias. También niegan, afirman,
incluyen o excluyen según sus propiedades lógicas. Estas compuertas se pueden aplicar en
otras áreas de la ciencia como mecánica, hidráulica o neumática.
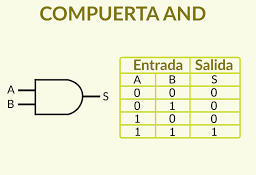
- COMPUERTA AND: Es representada por una multiplicación en el Álgebra de Boole. Indica
que es necesario que en todas sus entradas se tenga un estado binario 1 para que la
salida otorgue un 1 binario. En caso contrario de que falte alguna de sus entradas con este
estado o no tenga si quiera una accionada, la salida no podrá cambiar de estado y
permanecerá en 0. Esta puede ser simbolizada por dos o más interruptores en serie de los
cuales todos deben estar activos para que esta permita el flujo de la corriente.
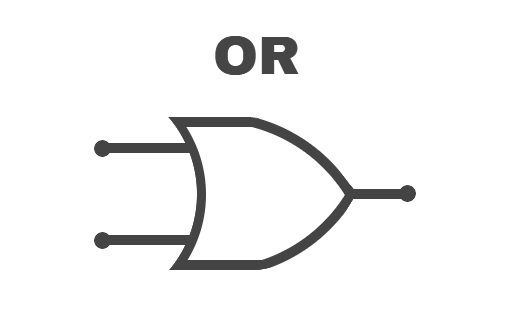
- COMPUERTA OR: En el Álgebra de Boole esta es una suma. Esta compuerta permite que con cualquiera
de sus entradas que este en estado binario 1, su salida pasara a un estado 1 también. No es necesario
que todas sus entradas estén accionadas para conseguir un estado 1 a la salida pero tampoco causa
algún inconveniente. Para lograr un estado 0 a la salida, todas sus entradas deben estar en el mismo
valor de 0. Se puede interpretar como dos interruptores en paralelo, que sin importar cual se accione,
será posible el paso de la corriente.
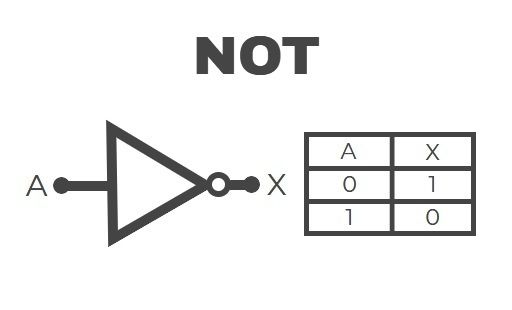
- COMPUERTA NOT En este caso esta compuerta solo tiene una entrada y una salida y esta actúa como un
inversor. Para esta situación en la entrada se colocara un 1 y en la salida otorgara un 0 y en el caso contrario
esta recibirá un 0 y mostrara un 1. Por lo cual todo lo que llegue a su entrada, será inverso en su salida.
- COMPUERTA AND: Es representada por una multiplicación en el Álgebra de Boole. Indica
que es necesario que en todas sus entradas se tenga un estado binario 1 para que la
salida otorgue un 1 binario. En caso contrario de que falte alguna de sus entradas con este
estado o no tenga si quiera una accionada, la salida no podrá cambiar de estado y
permanecerá en 0. Esta puede ser simbolizada por dos o más interruptores en serie de los
cuales todos deben estar activos para que esta permita el flujo de la corriente.
- Son circuitos electrónicos conformados internamente por transistores que se encuentran con
arreglos especiales con los que otorgan señales de voltaje como resultado o una salida de
forma booleana, están obtenidos por operaciones lógicas binarias. También niegan, afirman,
incluyen o excluyen según sus propiedades lógicas. Estas compuertas se pueden aplicar en
otras áreas de la ciencia como mecánica, hidráulica o neumática.
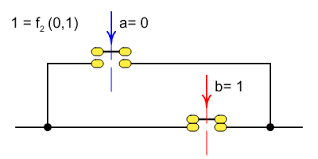
- DIAGRAMAS BÁSICOS EN LENGUAJE DE CONTACTOS Y COMBINATORIOS.
- El lenguaje ladder, diagrama ladder, diagrama/lógica de contactos, o diagrama en escalera, es un
lenguaje de programación gráfico muy popular dentro de los autómatas programables debido a que
está basado en los esquemas eléctricos de control clásicos. De este modo, con los conocimientos que
todo técnico o ingeniero eléctrico posee, es muy fácil adaptarse a la programación en este tipo de
lenguaje.
- El riel izquierdo (L1) es el que recibe el flujo de energía (entrada) que representa el voltaje y
deja pasar la energía al riel derecho que representa la tierra (salida). Su parecido con los
antiguos controladores de relés es innegable y su lectura obedece siempre la misma
instrucción; de izquierda a derecha y de arriba hacia abajo. Su naturaleza es ser simple y
fácil de utilizar lo que representa ahorro de tiempo y costos.
- El riel izquierdo (L1) es el que recibe el flujo de energía (entrada) que representa el voltaje y
deja pasar la energía al riel derecho que representa la tierra (salida). Su parecido con los
antiguos controladores de relés es innegable y su lectura obedece siempre la misma
instrucción; de izquierda a derecha y de arriba hacia abajo. Su naturaleza es ser simple y
fácil de utilizar lo que representa ahorro de tiempo y costos.
- El lenguaje ladder, diagrama ladder, diagrama/lógica de contactos, o diagrama en escalera, es un
lenguaje de programación gráfico muy popular dentro de los autómatas programables debido a que
está basado en los esquemas eléctricos de control clásicos. De este modo, con los conocimientos que
todo técnico o ingeniero eléctrico posee, es muy fácil adaptarse a la programación en este tipo de
lenguaje.
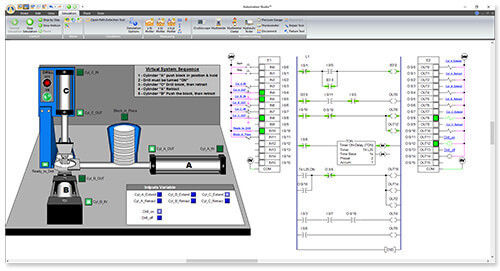
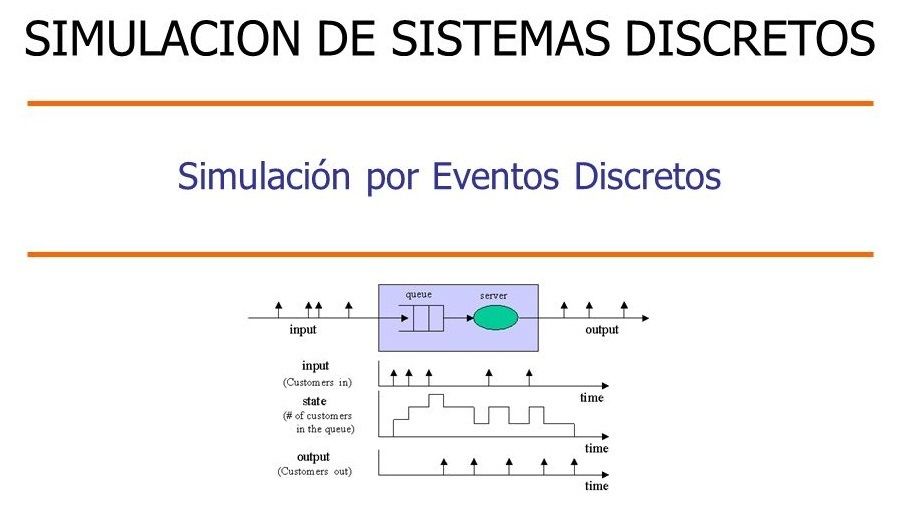
- AUTOMATIZACIÓN DE SISTEMAS DE EVENTOS DISCRETOS.
- La simulación de eventos discretos, es una herramienta de análisis que se
difunde rápidamente en el ambiente empresarial, comprobando su
utilidad para apoyar la toma de decisiones relacionadas con la planeación
de la producción y los inventarios, y con el diseño de los sistemas de
producción y sus cadenas de suministro
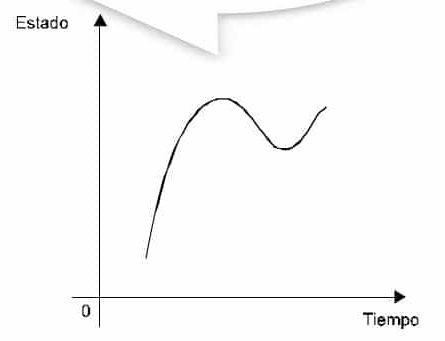
- El concepto de sistema de evento discreto tiene por finalidad identificar a sistemas en los que los
eventos que cambian el estado del mismo ocurren en instantes espaciados en el tiempo, a diferencia
de los sistemas cuyo estado puede cambiar continuamente en el tiempo. Aunque aparentemente
simples, los sistemas de eventos discretos, pueden modelar muchos de los fenómenos que
enfrentan los responsables de la administración de los procesos productivos en una empresa.
- El concepto de sistema de evento discreto tiene por finalidad identificar a sistemas en los que los
eventos que cambian el estado del mismo ocurren en instantes espaciados en el tiempo, a diferencia
de los sistemas cuyo estado puede cambiar continuamente en el tiempo. Aunque aparentemente
simples, los sistemas de eventos discretos, pueden modelar muchos de los fenómenos que
enfrentan los responsables de la administración de los procesos productivos en una empresa.
- La simulación de eventos discretos, es una herramienta de análisis que se
difunde rápidamente en el ambiente empresarial, comprobando su
utilidad para apoyar la toma de decisiones relacionadas con la planeación
de la producción y los inventarios, y con el diseño de los sistemas de
producción y sus cadenas de suministro
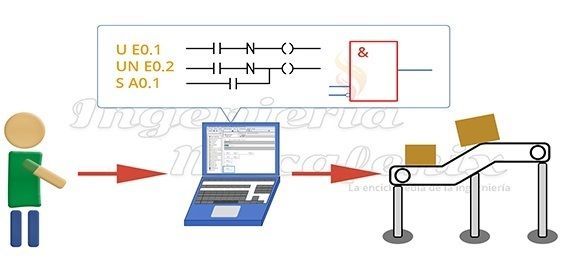
- PROGRAMACIÓN DE CONTROLADORES
LÓGICOS PROGRAMABLES.
- Programar un PLC implica generar un conjunto de instrucciones y
de órdenes que provocarán la ejecución de una tarea
determinada. Podemos decir que un programa es una respuesta
predeterminada a todas las combinaciones posibles de estados
de la información que recibe. La programación en PLC se
compone de diversas fases:
- 1 – Definición y análisis del problema: En primer lugar debemos identificar cuál
es la necesidad que queremos resolver a través de la controladora programable.
¿Qué resultados nos debe proporcionar el sistema? ¿Qué datos o información
nos hacen falta para poder determinar la respuesta de la máquina?
- 2 – Definición de la arquitectura del automatismo: Definiremos el hardware de la
controladora. Una vez que sepamos cuál es la información o los procesos que
necesitamos monitorizar, configuraremos las entradas de la controladora para
que pueda recibir los datos que se recogen a través de los sensores. Se definen
también las salidas a través de las cuáles se activarán procesos, y factores como
la redundancia o el diagnóstico.
- 3 – Diseño de los algoritmos: Un algoritmo consiste en una
secuencia de los pasos requeridos para ejecutar una tarea.
Así, se diseñara el método para la toma de decisiones.
- 4 – Programación de código: Con todos los procesos definidos,
pasaremos a redactar las órdenes que nos permitirán comunicarnos
con la máquina. Para ello se emplean los lenguajes de programación.
- 5 – Depuración, test y verificación del programa: La última fase implica una serie de tareas orientadas a
comprobar el correcto funcionamiento del programa. Se detectan posibles errores en la comunicación y se
hacen las correcciones oportunas para garantizar una óptima ejecución del automatismo programado.
- 5 – Depuración, test y verificación del programa: La última fase implica una serie de tareas orientadas a
comprobar el correcto funcionamiento del programa. Se detectan posibles errores en la comunicación y se
hacen las correcciones oportunas para garantizar una óptima ejecución del automatismo programado.
- 4 – Programación de código: Con todos los procesos definidos,
pasaremos a redactar las órdenes que nos permitirán comunicarnos
con la máquina. Para ello se emplean los lenguajes de programación.
- 3 – Diseño de los algoritmos: Un algoritmo consiste en una
secuencia de los pasos requeridos para ejecutar una tarea.
Así, se diseñara el método para la toma de decisiones.
- 2 – Definición de la arquitectura del automatismo: Definiremos el hardware de la
controladora. Una vez que sepamos cuál es la información o los procesos que
necesitamos monitorizar, configuraremos las entradas de la controladora para
que pueda recibir los datos que se recogen a través de los sensores. Se definen
también las salidas a través de las cuáles se activarán procesos, y factores como
la redundancia o el diagnóstico.
- 1 – Definición y análisis del problema: En primer lugar debemos identificar cuál
es la necesidad que queremos resolver a través de la controladora programable.
¿Qué resultados nos debe proporcionar el sistema? ¿Qué datos o información
nos hacen falta para poder determinar la respuesta de la máquina?
- Programar un PLC implica generar un conjunto de instrucciones y
de órdenes que provocarán la ejecución de una tarea
determinada. Podemos decir que un programa es una respuesta
predeterminada a todas las combinaciones posibles de estados
de la información que recibe. La programación en PLC se
compone de diversas fases:
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.