5800451
Descripción
Mapa Mental por Daniel Alc, actualizado hace más de 1 año
|
|
Creado por Daniel Alc
hace casi 8 años
|
|
APLICACIONES DE LA
INTEGRAL_UNIDAD III
- AREAS
Nota:
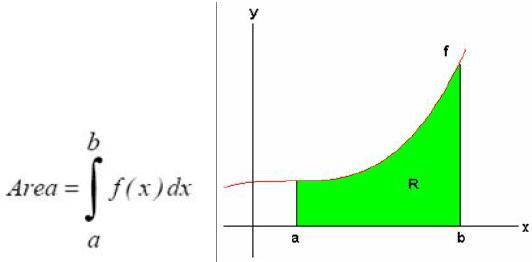
- Refiriéndonos a la historia, el cálculo integral se dio a la luz gracias al problema geométrico de hallar áreas de regiones no poligonales, es decir de regiones con aspecto curvo. De hecho, vamos a mostrar, como poder hallar áreas haciendo uso de la integral. Comencemos dando una primera definición de la relación que existe entre la integral y el área (bajo curva en primera medida) de una región no poligonal
- AREA BAJO LA GRAFICA DE UNA FUNCION
- Sí f es continua y no negativa en un
intervalo cerrado [a, b], el área de la
región limitada por la gráfica de f, el eje x
y las rectas verticales x = a y x = b viene
dada por:
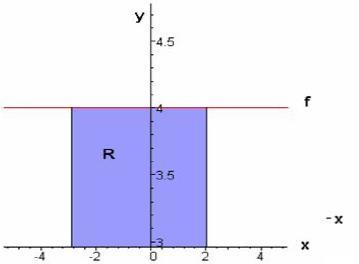
- EJEMPLO:
- 1.- Hallar el área de la región acotada por la
curva y las rectas f(x) = 4 y x =−3 y x = 2.
- 2.- DIBUJANDO EL PROBLEMA: En primera
medida, se debe trazar la región que se
pide. Aquí f es positiva y continua.
- 3.- LA INTEGRAL SE REPRESENTA - Aplicando la definición
anterior, el área de la región R viene dado por:
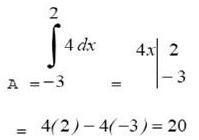
- 4.- De aqui se
procede a evaluar la
integral
- 5.- Luego el área de la región es 20 u². Obsérvese que esta región es rectangular, luego se puede
encontrar su área usando los métodos de la geometría. Desde este punto de vista se puede hacer
lo siguiente:
- EJEMPLO:
- 1.- Hallar el área de la región acotada por la curva
- 2.- DIBUJANDO EL PROBLEMA: Presentamos el trazo de la curva junto con el intervalo de acotación sobre el eje x, por su puesto.
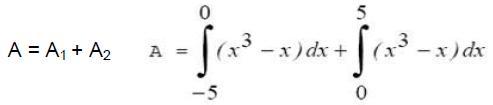
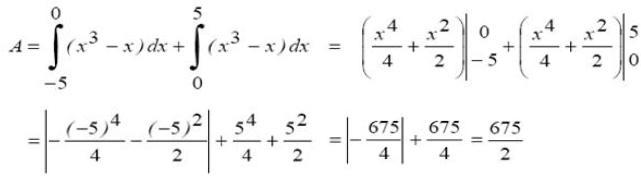
- 3.- REPRESENTACION DE LA INTEGRAL: Si se observa la de la izquierda, las rectas x= −5 y x = 5
dividen la región en dos partes; A1 y A2 respectivamente. También se puede ver que el intervalo
se puede dividir en dos, así: [−5,5] , [−5,0] y [−0,5]. Luego el área de la región (sombreada) viene
dada por:
- 4.- LA INTEGRAL QUEDARIA DE LA SIGUIENTE FORMA:
- AREA ENTRE LAS GRAFICAS DE FUNCIONES
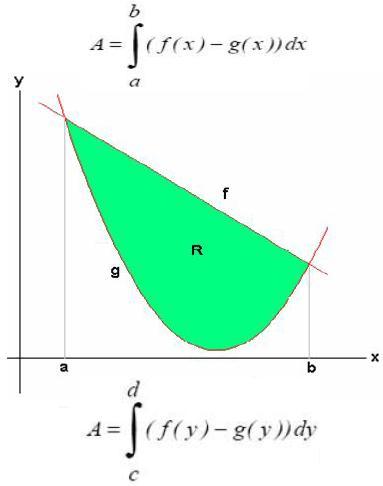
- Para estas regiones en particular, no se es dado los límites de integración, que serían los puntos de corte entre dos gráficas. Más bien,
para encontrarlos, basta hallar los x (o los y) para los cuales f-g. Por un momento observemos las siguientes gráficas, conservando las
mismas condiciones de las definiciones anteriores: (dos funciones continuas en un intervalo cerrado, etc.) Aquí, para la primera gráfica,
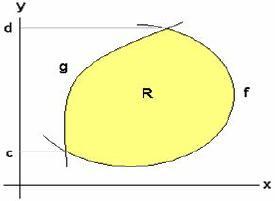
a y b son los puntos de corte de f (x) y g(x). En la segunda gráfica, c y d son los puntos de corte de f (y) y g(y). Ahora planteamos las
definiciones correspondientes que sugieren las graficas:
- DEFINICION 1: Dadas f y g positivas y continuas en un intervalo
cerrado [b,a] con, f(x) > g(y), el área de la región R está dada por:
- DEFINICION 2: Dadas f y g positivas y continuas en un
intervalo cerrado [d,c] con f(y)>g(y), el área de la región R
está dada por:
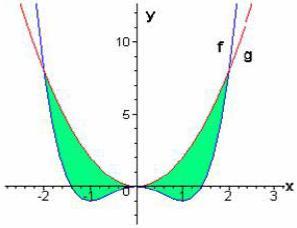
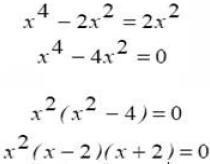
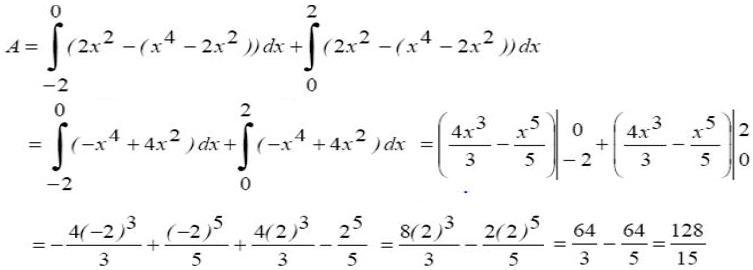
- EJEMPLO: Hallar el area de la region determinada por las curvas f (x)=2x² y g (x)=x²-2 x²
- 1.- DIBUJANDO EL PROBLEMA: Quedaria representado de la siguiente manera.
- Ahora tenemos que encontrar
los límites de integración, pero
en la gráfica podemos decir
que esos límites lo determinan
los puntos de intersección de f
y g. Como dijimos
anteriormente, estos se hallan
de la siguiente forma:
- Luego x=0, 2, –2 son los puntos de corte de ambas funciones. Después de esto, podemos establecer la integral que nos
permitirá hallar el área de la región pedida:
- Luego x=0, 2, –2 son los puntos de corte de ambas funciones. Después de esto, podemos establecer la integral que nos
permitirá hallar el área de la región pedida:
- Ahora tenemos que encontrar
los límites de integración, pero
en la gráfica podemos decir
que esos límites lo determinan
los puntos de intersección de f
y g. Como dijimos
anteriormente, estos se hallan
de la siguiente forma:
- 1.- DIBUJANDO EL PROBLEMA: Quedaria representado de la siguiente manera.
- DEFINICION 1: Dadas f y g positivas y continuas en un intervalo
cerrado [b,a] con, f(x) > g(y), el área de la región R está dada por:
- Para estas regiones en particular, no se es dado los límites de integración, que serían los puntos de corte entre dos gráficas. Más bien,
para encontrarlos, basta hallar los x (o los y) para los cuales f-g. Por un momento observemos las siguientes gráficas, conservando las
mismas condiciones de las definiciones anteriores: (dos funciones continuas en un intervalo cerrado, etc.) Aquí, para la primera gráfica,
a y b son los puntos de corte de f (x) y g(x). En la segunda gráfica, c y d son los puntos de corte de f (y) y g(y). Ahora planteamos las
definiciones correspondientes que sugieren las graficas:
- Luego el área de la región
sombreada es de 675/2 u² .
- AREA ENTRE LAS GRAFICAS DE FUNCIONES
- 4.- LA INTEGRAL QUEDARIA DE LA SIGUIENTE FORMA:
- 3.- REPRESENTACION DE LA INTEGRAL: Si se observa la de la izquierda, las rectas x= −5 y x = 5
dividen la región en dos partes; A1 y A2 respectivamente. También se puede ver que el intervalo
se puede dividir en dos, así: [−5,5] , [−5,0] y [−0,5]. Luego el área de la región (sombreada) viene
dada por:
- 2.- DIBUJANDO EL PROBLEMA: Presentamos el trazo de la curva junto con el intervalo de acotación sobre el eje x, por su puesto.
- 1.- Hallar el área de la región acotada por la curva
- EJEMPLO:
- 5.- Luego el área de la región es 20 u². Obsérvese que esta región es rectangular, luego se puede
encontrar su área usando los métodos de la geometría. Desde este punto de vista se puede hacer
lo siguiente:
- 4.- De aqui se
procede a evaluar la
integral
- 2.- DIBUJANDO EL PROBLEMA: En primera
medida, se debe trazar la región que se
pide. Aquí f es positiva y continua.
- 1.- Hallar el área de la región acotada por la
curva y las rectas f(x) = 4 y x =−3 y x = 2.
- EJEMPLO:
- En ella se ve que f es una función continua,
positiva (por encima del eje x), y la región R
está limitada (acotada) por las rectas
verticales x = a y x = b. Podemos hallar el
área de la región R por medio de una
integral definida aplicando la definición
anterior.
- Sí f es continua y no negativa en un
intervalo cerrado [a, b], el área de la
región limitada por la gráfica de f, el eje x
y las rectas verticales x = a y x = b viene
dada por:
- LONGITUD DE CURVAS
- En matemática, la longitud de arco, también llamada rectificación de una curva, es la medida de la distancia o camino
recorrido a lo largo de una curva o dimensión lineal. Históricamente, ha sido difícil determinar esta longitud en segmentos
irregulares; aunque fueron usados varios métodos para curvas específicas, la llegada del cálculo trajo consigo la fórmula
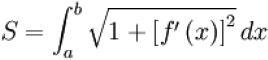
general para obtener soluciones cerradas para algunos casos. Al considerar una curva definida por una función f (x) y su
respectiva derivada f´(x) que son continúas en un intervalo [a, b], la longitud S del arco delimitado por a y b es dada por la
ecuación:
- En el caso de una curva definida paramétricamente mediante dos funciones dependientes de t como x = f(t) e y = g(t), la
longitud del arco desde el punto (f (a), g (a) ) hasta el punto (f (b), g (b) ) se calcula mediante:
- Si la función está definida por coordenadas polares donde la coordenadas radial y el ángulo polar están relacionados mediante
r = f (Ɵ) , la longitud del arco comprendido en el intervalo [ α,β ], toma la forma:
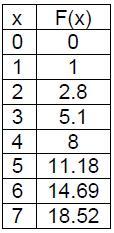
- En la mayoría de los casos, no hay una solución cerrada disponible y será necesario usar métodos de integración numérica.
Por ejemplo, aplicar esta fórmula a la circunferencia de una elipse llevará a una integral elíptica de segundo orden.
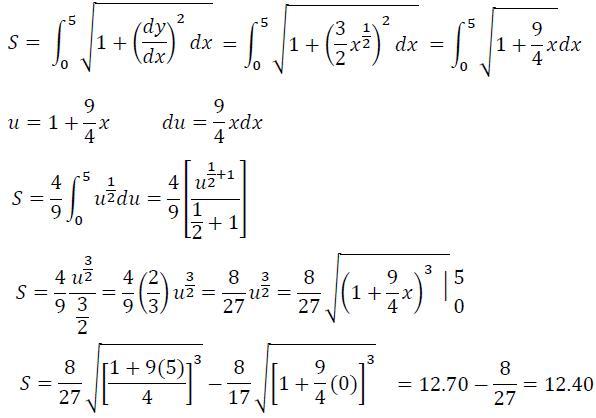
- EJEMPLO: Calcular la longitud de arco de la siguiente curva
- EJEMPLO: Calcular la longitud de arco de la siguiente curva
- En la mayoría de los casos, no hay una solución cerrada disponible y será necesario usar métodos de integración numérica.
Por ejemplo, aplicar esta fórmula a la circunferencia de una elipse llevará a una integral elíptica de segundo orden.
- Si la función está definida por coordenadas polares donde la coordenadas radial y el ángulo polar están relacionados mediante
r = f (Ɵ) , la longitud del arco comprendido en el intervalo [ α,β ], toma la forma:
- En el caso de una curva definida paramétricamente mediante dos funciones dependientes de t como x = f(t) e y = g(t), la
longitud del arco desde el punto (f (a), g (a) ) hasta el punto (f (b), g (b) ) se calcula mediante:
- En matemática, la longitud de arco, también llamada rectificación de una curva, es la medida de la distancia o camino
recorrido a lo largo de una curva o dimensión lineal. Históricamente, ha sido difícil determinar esta longitud en segmentos
irregulares; aunque fueron usados varios métodos para curvas específicas, la llegada del cálculo trajo consigo la fórmula
general para obtener soluciones cerradas para algunos casos. Al considerar una curva definida por una función f (x) y su
respectiva derivada f´(x) que son continúas en un intervalo [a, b], la longitud S del arco delimitado por a y b es dada por la
ecuación:
- CALCULO DE VOLUMENES DE SOLIDOS DE REVOLUCION
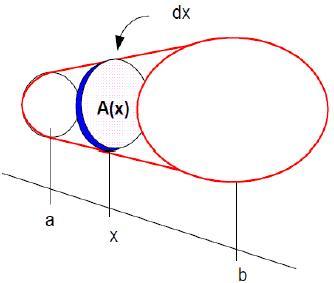
- Definición: El volumen de un sólido con área transversal conocida e integrable A(x) desde x = a hasta x = b, es:
- Comúnmente a esta integración se le denomina “método de las rebanadas”.
- Si una gráfica de una función continua f(x) en el intervalo [a,b] se hace girar sobre el eje x, a la superficie
bajo la curva se le denomina “área generatriz”, a la superficie delimitada por f(x) al girar se le llama
“superficie de revolución” y al volumen delimitado por la superficie de revolución se le llama “sólido de
revolución”. La rotación no necesariamente se debe de efectuar sobre el eje x, pero sin pérdida de
generalidad el eje siempre se puede ubicar en esa posición. Volumen de un sólido de revolución (método de
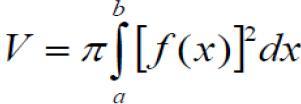
los discos): El volumen de un sólido generado alrededor del eje x la región bajo la curva de f(x) en el
intervalo [a,b] en que f(x) es continua es:
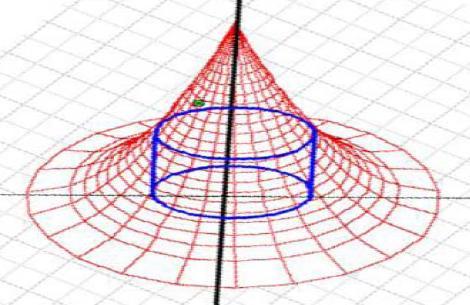
- El “disco” señalado en azul en la figura tiene radio f(x) de ahí empleando el área del círculo se obtiene la
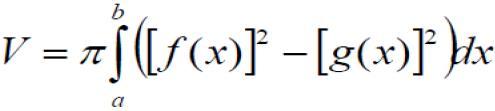
expresión previa. Si el volumen se genera por una superficie entre curvas, se generaliza el método de los
discos y se le denomina método de las arandelas , en este caso si f(x)≥g(x) en [a,b] limitan la superficie, se
tiene:
- Volumen de un sólido de revolución (método de los tubos o casquillos cilíndricos): El sólido de revolución
generado por una función f(x) que gira alrededor del eje y, limitado por las rectas x = a y x = b, el eje x y la
gráfica de f(x), tiene un volumen:
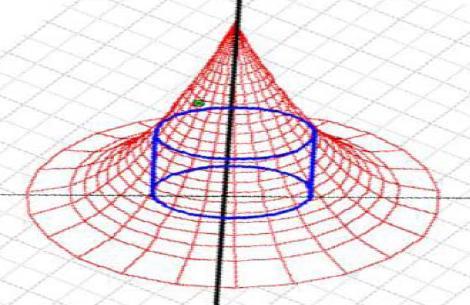
- En la figura se observa –en azul– un tubo típico de radio x,
espesor dx y altura f(x), que puede ser convertido en una lámina
rectangular de superficie 2πxf(x) y espesor dx.
- En la figura se observa –en azul– un tubo típico de radio x,
espesor dx y altura f(x), que puede ser convertido en una lámina
rectangular de superficie 2πxf(x) y espesor dx.
- Volumen de un sólido de revolución (método de los tubos o casquillos cilíndricos): El sólido de revolución
generado por una función f(x) que gira alrededor del eje y, limitado por las rectas x = a y x = b, el eje x y la
gráfica de f(x), tiene un volumen:
- El “disco” señalado en azul en la figura tiene radio f(x) de ahí empleando el área del círculo se obtiene la
expresión previa. Si el volumen se genera por una superficie entre curvas, se generaliza el método de los
discos y se le denomina método de las arandelas , en este caso si f(x)≥g(x) en [a,b] limitan la superficie, se
tiene:
- Si una gráfica de una función continua f(x) en el intervalo [a,b] se hace girar sobre el eje x, a la superficie
bajo la curva se le denomina “área generatriz”, a la superficie delimitada por f(x) al girar se le llama
“superficie de revolución” y al volumen delimitado por la superficie de revolución se le llama “sólido de
revolución”. La rotación no necesariamente se debe de efectuar sobre el eje x, pero sin pérdida de
generalidad el eje siempre se puede ubicar en esa posición. Volumen de un sólido de revolución (método de
los discos): El volumen de un sólido generado alrededor del eje x la región bajo la curva de f(x) en el
intervalo [a,b] en que f(x) es continua es:
- Comúnmente a esta integración se le denomina “método de las rebanadas”.
- Definición: El volumen de un sólido con área transversal conocida e integrable A(x) desde x = a hasta x = b, es:
- CALCULO DE CENTROIDES
- Cuando una placa sólida es de espesor constante y homogéneo, su masa es directamente proporcional a su área, en donde la
proporcionalidad depende del espesor de la placa y la densidad del material.
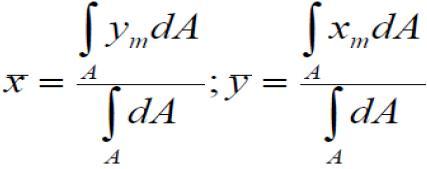
- Definición: Las coordenadas del centro de masa de una placa plana delimitada por la
superficie A, se definen como:
- En donde la A bajo las integrales implica que éstas se realizan para toda la superficie, ym y xm corresponde con el punto medio
del elemento dA. Cuando A está delimitada por f(x) y g(x), y f(x)>g(x) en [a,b]:
- Debido al principio físico de la palanca, se define el momento o torque t de una fuerza respecto de un punto, como el producto
de la magnitud de la fuerza y la distancia de la fuerza al punto, t = Fs. Por otro lado, si consideras una placa plana de cualquier
material y la cortaras en pequeños rectángulos de masa dm, cada uno de ellos respecto de un eje elegido provocará un pequeño
momento dt = sdm, de donde el momento total será:
- en donde se indica que la integral se realiza sobre toda el área. En particular si los ejes seleccionados son el x o el y, y además el
material de la placa es homogéneo, la masa es proporcional al área y los momentos se puedes expresar en función de las
coordenadas y y x respectivamente. Así el momento total sobre el eje x e y son respectivamente:
- ¿Existirá algún valor de x en el que se pueda concentrar toda la masa de la placa y provoque el mismo momento total? ¿Se podrá
dar una condición similar en y? Supóngase que esos valores existen y son:
- O finalmente
- O finalmente
- ¿Existirá algún valor de x en el que se pueda concentrar toda la masa de la placa y provoque el mismo momento total? ¿Se podrá
dar una condición similar en y? Supóngase que esos valores existen y son:
- en donde se indica que la integral se realiza sobre toda el área. En particular si los ejes seleccionados son el x o el y, y además el
material de la placa es homogéneo, la masa es proporcional al área y los momentos se puedes expresar en función de las
coordenadas y y x respectivamente. Así el momento total sobre el eje x e y son respectivamente:
- Debido al principio físico de la palanca, se define el momento o torque t de una fuerza respecto de un punto, como el producto
de la magnitud de la fuerza y la distancia de la fuerza al punto, t = Fs. Por otro lado, si consideras una placa plana de cualquier
material y la cortaras en pequeños rectángulos de masa dm, cada uno de ellos respecto de un eje elegido provocará un pequeño
momento dt = sdm, de donde el momento total será:
- En donde la A bajo las integrales implica que éstas se realizan para toda la superficie, ym y xm corresponde con el punto medio
del elemento dA. Cuando A está delimitada por f(x) y g(x), y f(x)>g(x) en [a,b]:
- Definición: Las coordenadas del centro de masa de una placa plana delimitada por la
superficie A, se definen como:
- Cuando una placa sólida es de espesor constante y homogéneo, su masa es directamente proporcional a su área, en donde la
proporcionalidad depende del espesor de la placa y la densidad del material.
- OTRAS APLICACIONES
- Área de una superficie de revolución Partiendo de la longitud del arco y el método de tubos de altura diferencial dL se tiene:
Definición: Si la función f(x)≥0 es suave en [a,b], el área de la superficie generada al girar la curva de f(x) alrededor del eje x es:
- Definición: Si la función g(y)≥0 es suave en [c,d], el área de la superficie generada al girar la curva de g(y) alrededor del eje y
es:
- MOMENTOS DE INERCIA - En el contexto de la Dinámica de los cuerpos rígidos, la inercia es una medida de la resistencia que
opone un cuerpo a que se produzca un cambio en su estado de reposo o de movimiento. A mayor inercia mayor es la
resistencia al cambio, de tal forma que si se aplica la misma fuerza a dos cuerpos, el de mayor inercia sufrirá el menor
cambio en su estado de movimiento, o “reaccionará en forma más lenta”. Para el movimiento de translación la inercia es
equivalente a la masa, pero para el movimiento de rotación depende de “momentos de inercia”. En el caso de un sólido
“plano”, el momento de inercia se mide respecto del punto en que se coloca el eje de rotación –cualquiera que se quiera– y se
define para un punto de materia como I = r² m, donde r es la distancia del punto materia hasta el eje de rotación. Para poder
considerar un cuerpo completo se tendrá que dI = r² dm o finalmente:
- En donde nuevamente r es la distancia entre cada elemento diferencial de masa y el punto p (el eje de rotación), la integral
se hace sobre todo el cuerpo de masa M, z identifica que el cuerpo se pretende hacer girar sobre un eje perpendicular a la
superficie y que pasa por p. Si el cuerpo es homogéneo el peso se distribuye igualitariamente a lo largo del cuerpo y la masa
dependerá del volumen y su densidad específica, a su vez si el cuerpo es de espesor constante t, el volumen depender de t y
del área, por lo que finalmente se puede escribir:
- En donde r se sustituyó con respecto al teorema de Pitágoras. Resolviendo las integrales
adecuadamente podrás comparar en donde conviene colocar el eje sobre un cuerpo que va
a girar.
- En donde r se sustituyó con respecto al teorema de Pitágoras. Resolviendo las integrales
adecuadamente podrás comparar en donde conviene colocar el eje sobre un cuerpo que va
a girar.
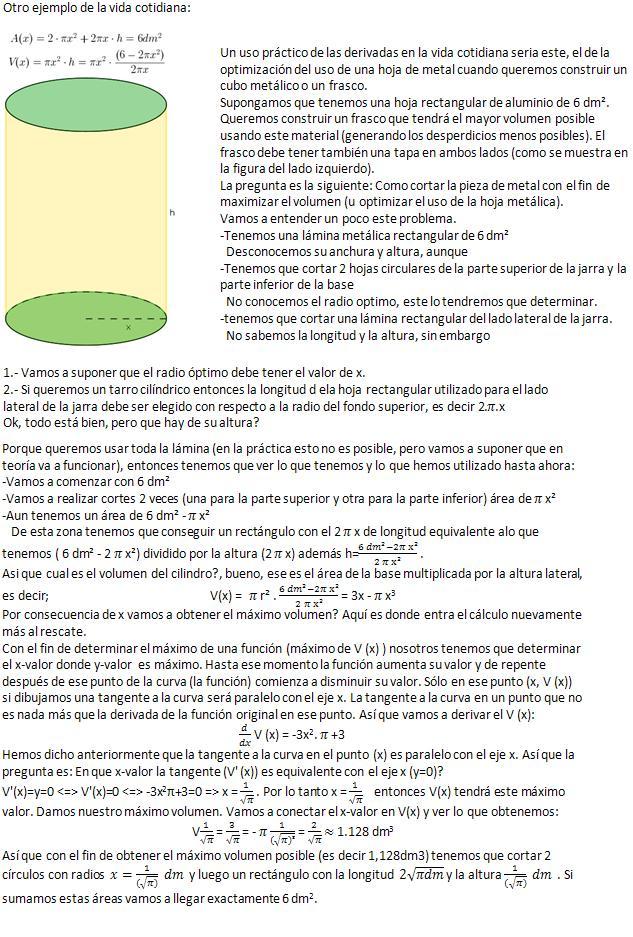
- APLICACIONES DE LA DERIVADA EN LA VIDA COTIDIANA
- En donde nuevamente r es la distancia entre cada elemento diferencial de masa y el punto p (el eje de rotación), la integral
se hace sobre todo el cuerpo de masa M, z identifica que el cuerpo se pretende hacer girar sobre un eje perpendicular a la
superficie y que pasa por p. Si el cuerpo es homogéneo el peso se distribuye igualitariamente a lo largo del cuerpo y la masa
dependerá del volumen y su densidad específica, a su vez si el cuerpo es de espesor constante t, el volumen depender de t y
del área, por lo que finalmente se puede escribir:
- MOMENTOS DE INERCIA - En el contexto de la Dinámica de los cuerpos rígidos, la inercia es una medida de la resistencia que
opone un cuerpo a que se produzca un cambio en su estado de reposo o de movimiento. A mayor inercia mayor es la
resistencia al cambio, de tal forma que si se aplica la misma fuerza a dos cuerpos, el de mayor inercia sufrirá el menor
cambio en su estado de movimiento, o “reaccionará en forma más lenta”. Para el movimiento de translación la inercia es
equivalente a la masa, pero para el movimiento de rotación depende de “momentos de inercia”. En el caso de un sólido
“plano”, el momento de inercia se mide respecto del punto en que se coloca el eje de rotación –cualquiera que se quiera– y se
define para un punto de materia como I = r² m, donde r es la distancia del punto materia hasta el eje de rotación. Para poder
considerar un cuerpo completo se tendrá que dI = r² dm o finalmente:
- Definición: Si la función g(y)≥0 es suave en [c,d], el área de la superficie generada al girar la curva de g(y) alrededor del eje y
es:
- Área de una superficie de revolución Partiendo de la longitud del arco y el método de tubos de altura diferencial dL se tiene:
Definición: Si la función f(x)≥0 es suave en [a,b], el área de la superficie generada al girar la curva de f(x) alrededor del eje x es:
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.