14906010
| Question | Answer |
| Vector Posición \(\vec r\) | \(\vec r = x \vec i + y \vec j + z \vec k \) |
| Trayectoria | Linea geométrica que describe el movimiento de una partícula |
| Ecuación del \(\vec r\) | \(\vec r = x (t) \vec i + y (t) \vec j + z (t) \vec k \) |
| Otras expresiones de la Ecuación del \(\vec r\) | \(\cdot Paramétricas: \\ x = t+2 \\ y=t^2 \\ \cdot Explícitas: \\ t = x - 2 \\y = t^2\Longrightarrow{y = (x-2)^2} \\ \cdot Implícita: \\ y +(x-2)^2 =0\) |
| Desplazamiento | Cambio de la posición en un intervalo de tiempo |
| Vector Desplazamiento \(\Delta \vec r\) | \[\Delta \vec r = \vec r_f - \vec r_i = (x_f - x_i) \vec i + (y_f - y_i) \vec j + (z_f - z_i) \vec k \] |
| \(|\Delta \vec r|\) | \[ | \Delta \vec r | = \sqrt{(x_f - x_i)^2 + (y_f - y_i)^2 + (z_f - z_i)^2}\] |
| Espacio Recorrido \(\Delta S\) | Es la longitud del tramo de trayectoria recorrida entre la posición inicial y final del móvil. \[\Delta S = S_f - S_i \] En trayectorías circulares el \(\Delta S\) el cálculo del espacio recorrido es equivalente al cálculo de la longitud del arco de circunferencia que viene dado por: \[L = \theta \cdot r\] |
| \(\Delta S\) vs \(\Delta \vec r\) | El espacio recorrido es una magnitud escalar que se mide sobre la trayectoria. \(\cdot \) Magnitud Escalar \(\cdot \) Depende de la trayectoria \(\cdot \) Su valor coincide con el módulo del vector desplazamiento cuando la trayectoria es una línea recta y no se producen cambios de sentido. \(\cdot \) Siempre aumenta cuando el cuerpo se mueve, independientemente de la trayectoria. El desplazamiento es una magnitud vectorial que sólo depende de la posición inicial y final del cuerpo y es independiente de la trayectoria. \(\cdot \) Magnitud Vectorial \(\cdot \)Depende de los punto inicial y final \(\cdot \)Su módulo coincide con el espacio recorrido cuando la trayectoria es una línea recta y no se producen cambios de sentido. \(\cdot \)Su módulo aumenta o disminuye con el movimiento según la trayectoria descrita. |
| Velocidad Media \(\vec {v_m}\) | Se define la velocidad media de un cuerpo que se mueve entre dos puntos \(P_1\) y \(P_2\) como el cociente entre el vector desplazamiento y el intervalo de tiempo en que transcurre el desplazamiento. |
| \(\cdot \) Ecuación \(\vec {v_m}\) y \(\cdot \) \(|\vec {v_m}|\) | \[\vec {v_m} = \frac{\Delta \vec r}{\Delta t} = \frac{\vec {r_f} - \vec {r_i}}{t_f - t_i} = \frac {\Delta x \hat i + \Delta y \hat j + \Delta z \hat k}{t_f - t_i} \] \[\vec {v_m}= \frac{\Delta x}{\Delta t} \hat i + \frac{\Delta y}{\Delta t} \hat j + \frac{\Delta z}{\Delta t} \hat k \] \[\vec {v_m} = {v_mx} \hat i + {v_my} \hat j + {v_mz} \hat k\] \[ | \vec {v_m} | = \sqrt{{{v_{mx}}^2 + {v_{my}}^2 + {v_{mz}}^2}}\] |
| Velocidad Instantánea \(\vec v\) | Velocidad que tiene el cuerpo en un instante específico, en un punto determinado de su trayectoria. |
| Ecuación \(\vec v\) | Se define la velocidad instantánea como el límite de la velocidad media cuando el intervalo de tiempo considerado tiende a 0. También se define como la derivada del vector de posición respecto al tiempo. Su expresión viene dada por: \[\vec v = \lim_{\Delta t \to 0} \vec {v_m} = \lim_{\Delta t \to 0} \frac{\Delta \vec r}{\Delta t} = \frac{\mathrm d\vec r}{\mathrm d t}\] |
| \(|\vec v|\) | En función del Desplazamiento o Espacio Recorrido: \[ | \vec v | = \lim_{\Delta t \to 0} |\vec {v_m}| = \lim_{\Delta t \to 0} \frac{|\vec r|}{\Delta t} = \lim_{\Delta t \to 0} \frac{\Delta S}{\Delta t}\] En Coordenadas Cartesianas: \[ | \vec v | = \sqrt{{{v_x}^2 + {v_y}^2 + {v_z}^2}}\] |
| Características del \(\vec v\) | \(\cdot \) Magnitud Vectorial \(\cdot \) Dirección Tg a la Trayectoria \(\cdot \) Igual Sentido que el Movimiento |
| Celeridad Media \(c_m\) | Se define la celeridad media o rapidez media de un cuerpo que se mueve entre dos puntos \(P_1\) y \(P_2\) como el cociente entre el espacio recorrido y el intervalo de tiempo en que transcurre el movimiento |
| Ecuación \(c_m\) | \[c_m = \frac{\Delta S}{\Delta t} \] |
| Características de la \(c_m\) | \(\cdot \) Magnitud Escalar \(\cdot \) Depende del Espacio Recorrido |
| Celeridad Instantánea \(c\) | \[c = \lim_{\Delta t \to 0}\frac{\Delta S}{\Delta t} \] |
| \(c\) vs \(\vec {v_m}\) | El valor de la celeridad instantánea coincide con el del módulo de la velocidad instantánea en ese punto. Sin embargo no te confundas: La velocidad instantánea es un vector mientras que la celeridad instantánea es un escalar. |
| Aceleración \(\vec a\) | Decimos que un cuerpo tiene aceleración cuando varía su velocidad en el transcurso del tiempo ya sea en: \(\cdot \) Módulo o \(\cdot \) Dirección |
| Tipos de \(\vec a\) | En función del Intervalo de Tiempo: \(\cdot \) Acelerazión Media \(\cdot \) Aceleración Instantánea En función del Sistema de Referecia: \(\cdot \) Aceleración Tangencial \(\cdot \) Aceleración Normal |
| Aceleración Media \(\vec {a_m}\) | Se define la aceleración media entre dos puntos \(P_1\) y \(P_2\) como la división de la variación de la velocidad y el tiempo transcurrido entre ambos puntos. |
| \(\cdot \) Ecuación y \(\cdot \) \(|\vec {a_m}|\) | \[\vec {a_m} = \frac{\Delta \vec v}{\Delta t}\] \[ |\vec {a_m}| = \frac{| \vec {v}| }{\Delta t} \] |
| Aceleración Instantánea \(\vec a \) | La aceleración instantánea de un cuerpo es la que tiene el cuerpo en un instante específico, en un punto determinado de su trayectoria. Se define como el límite de la aceleración media cuando el intervalo de tiempo considerado tiende a 0. También se define de manera equivalente como la derivada de la velocidad respecto al tiempo. En general su Dirección y Sentido NO coincide con la del vector velocidad sino que dependen del cambio que experimente esta. |
| \(\cdot \) Ecuación \(\vec a \) y \(\cdot \) \(|\vec a|\) | \[ \vec a = \lim_{\Delta t \to 0} \vec {a_m} = \lim_{\Delta t \to 0} \frac{\Delta \vec v}{\Delta t} = \frac{\mathrm d\vec v}{\mathrm d t}\] \[ | \vec a | = \sqrt{{{a_x}^2 + {a_y}^2 + {a_z}^2}}\] |
| Componentes Intrínsecas del \(|\vec a|\) | Se define el sistema de referencia intrínseco para cada punto de la trayectoria como un sistema de coordenadas formado por dos ejes: \(\cdot \) Eje tangente: Su dirección es tangente a la trayectoria y el sentido positivo será el de la velocidad en ese punto. Se define por el vector unitario \(\vec {u_t}\) \(\cdot \) Eje normal: Su dirección es perpendicular a la trayectoria y el sentido positivo será el que se dirige al centro de curvatura de la trayectoria. Se define por el vector unitario \(\vec {u_n}\) |
| \(\cdot \)Descomposición del \(\vec a\) en los Ejes Intrínsecos \(\cdot \) El \(|\vec a|\) | \(\cdot \) A la componente que se proyecta sobre el eje tangente se le llama Componente Tangencial y es la responsable del cambio del módulo de la velocidad. \(\cdot \) A la que se proyecta sobre el eje normal se le llama componente normal o Componente Centrípeta y es la responsable de la dirección de la velocidad. \[ \vec a = \vec {a_t} + \vec {a_n} = a_t \vec {u_t} + a_t \vec {u_t}\] Dado que los ejes son perpendiculares entre sí, el módulo de la aceleración puede calcularse como: \[ | \vec a | = \sqrt{{{a_t}^2 + {a_n}^2}}\] |
| Aceleración Tangencial \(\vec {a_t}\) | \[ \vec a =\frac{\mathrm d\vec v }{\mathrm d t} = \frac{\mathrm d (v \cdot \vec {u_t} ) }{\mathrm d t} \overbrace { = }^ {D (a.b)} \frac{\mathrm dv }{\mathrm dt }\cdot \vec {u_t} + v\cdot\frac{\mathrm d\vec {u_t} }{\mathrm dt } \] |
| Características de la \(\vec {a_t}\) | La aceleración tangencial mide los cambios del módulo de la velocidad en el tiempo. Su expresión viene dada por: \(\frac{\mathrm dv }{\mathrm dt }\cdot \vec {u_t}\) El valor de la aceleración tangencial puede ser: \(\cdot \) > 0 : el módulo del vector velocidad aumenta con el tiempo \(\cdot \) < 0 : el módulo del vector velocidad disminuye con el tiempo \(\cdot \) = 0 : Cuando el cuerpo tiene un movimiento uniforme, el módulo del vector velocidad permanece constante |
| Aceleración centrípeta o normal \(\vec {a_n}\) | La aceleración normal o centrípeta mide los cambios de dirección de la velocidad en el tiempo. |
| Ecuación de la \(\vec {a_n}\) | \[\vec {a_n} = \frac{v^2 }{\rho} \vec u_n\] \(\rho\) es el radio de curvatura. En el caso de los movimiento circulares, coincide con el radio de giro del cuerpo. |
| Características de la \(\vec {a_n}\) | la \(\vec {a_n}\) puede ser: \(\cdot\) = 0 : En los movimientos rectilíneos, donde la dirección permanece constante. \(\cdot\) > 0 : En los movimientos curvilíneos, donde la velocidad cambia continuamente de dirección. Cualquier trayectoria que describa un cuerpo se puede considerar como una composición de trayectorias rectas y curvas. Las partes curvas de la trayectoria pueden a su vez considerarse arcos de circunferencia. |
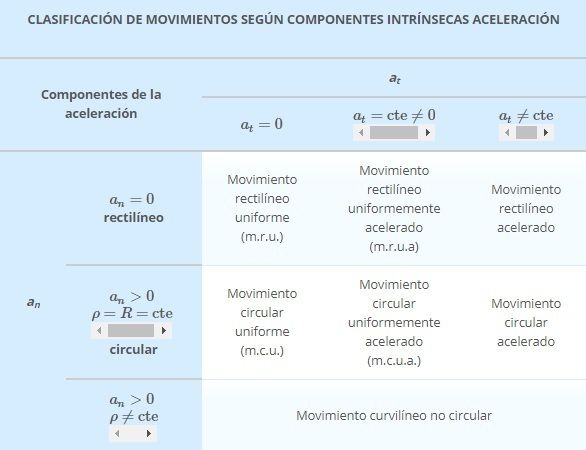
| Tipos de movimientos según componentes intrínsecas de la \(\vec a\) | |
| Movimientos Rectilíneos | \(\cdot\) Su trayectoria es una línea recta. \(\cdot\) NO tiene \(\vec {a_n}\), responsable del cambio en la dirección del movimiento. \(\cdot\) Sólo tiene \(\vec {a_t}\), responsable del cambio del módulo del \(\vec v\) |
| MRU | Un cuerpo realiza un MRU cuando su trayectoria es una línea recta y su velocidad es constante. Esto implica que recorre distancias iguales en tiempos iguales. \(\cdot\) La aceleración es cero (a=0) al no cambiar la velocidad de dirección ni variar su módulo. \(\cdot\) Por otro lado, la \(\vec {v_o}\), \(\vec {v_m}\) y la \(\vec {v}\) del movimiento tienen el mismo valor en todo momento. |
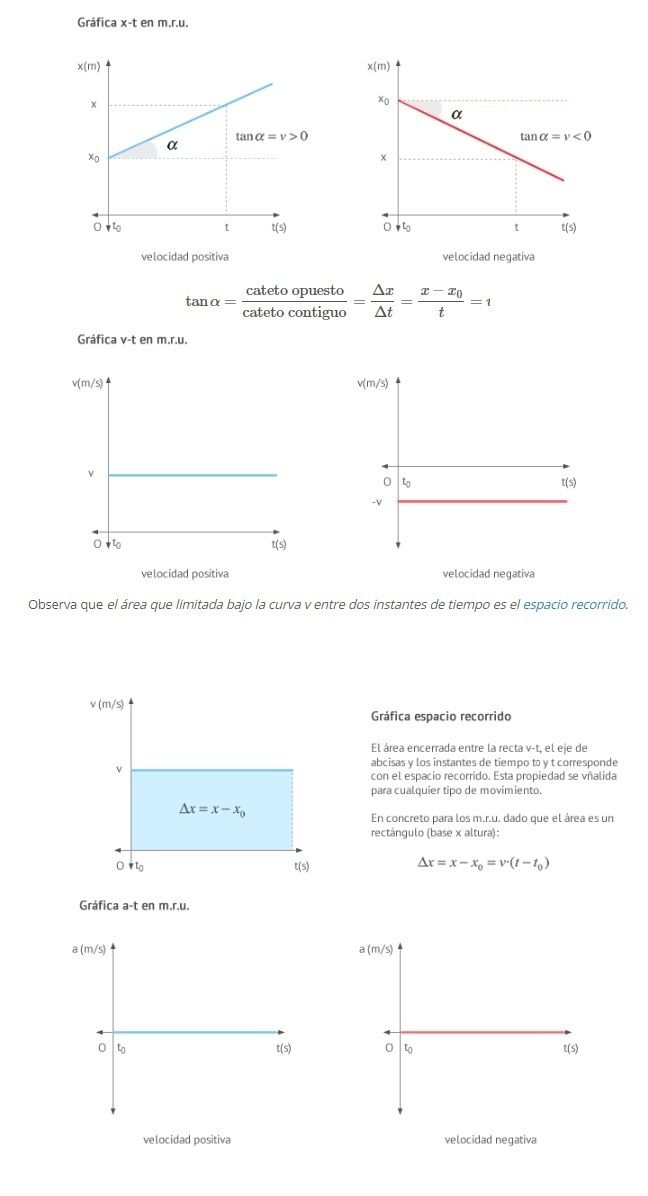
| Ecuaciones MRU | \[x = x_o + \vec v t \] \[\vec v = \vec {v_o} = cte \] \[\vec {a} = 0\] \[ \vec {v_m} = \frac{\Delta x}{\Delta t} = \overbrace{\frac{x - x_o}{t - t_o}}^{\vec {v_m} = \vec v}\ \underbrace{ = }_{t_o = 0} = \left. \frac{x-x_o}{t} \right\} \longrightarrow{} x - x_o = \vec v \cdot t \longrightarrow \atop \mathbf{ x = x_o + \vec v \cdot t} \] |
| Gráficas MRU | |
| MRUA | \(\cdot\)La trayectoria es una línea recta y por tanto, la \(\mathbf {\vec {a_n}}\)es cero \(\cdot\)La \(\mathbf{\vec {v_m}}\) cambia su módulo de manera uniforme \(\cdot\) La \(\mathbf{\vec {_t}}\) es constante. Por ello la \(\vec {a_n} = \vec a\) |
| Ecuaciones MRUA | \(\mathbf {v_x = v_{ox} + a_xt}\) \(\mathbf {x = x_o + v_xt + \frac{1}{2}a_xt^2}\) \(\mathbf {{v_x}^2 = {v_ox}^2 + 2{a_x}(x-x_o)} \) \(\mathbf {x - x_o} = \mathbf {\left(\frac{v_ox + v_x}{2}\right)t}\) |
| Deducción Ecuaciones MRUA | DEDUCIÓN ECUACIÓN POSICIÓN \[ \mathbf {x = x - x_o = v_{mx} \cdot t \overbrace{=}^{1} = \frac {v_x - v_{ox}}{2} \cdot t \underbrace{ = }_{ 2 } \left. \frac{v_{ox} + a_xt + v_{ox}}{2} \right\} \longrightarrow{} v_x - v_{ox} = a_x \cdot t \longrightarrow \atop \mathbf{ v_x = v_{ox} + a_x \cdot t}} \] |
| Gráficas MRUA | pendiente img en tablet |
| Ecuaciones Caída Libre | Utilizando el sistema de rferencia habitual donde la partículabse encuentra sobre el eje y+ y su posición inicial \(y_o)\ se corresponde con la altua (h), su \(\v_o= 0\) ya que parte del reposoy su \(\vec_a = g\) cte y negativo ya que la tendencia del movimiento es contrario al eje y. Los valores obtenidos de la velovidad también serán negativos. \[y = y_o - \frac{1}{2} gt^2\] \[v_y = - gt\] \[\vec a = -g (cte)\] Recordar que la caída libre al vacío no depende de la masa. |
| Lanzamiento Vertical | utilizando el sistema de referencia cuyo origen de coordenadas se encuentra en el pie de la vertical del punto donde donde se lanza la partícula, considerando el sentido positivo del eje y apuntanado hacia arriba. Si se lanza arriba: \[y = y_o + v_{oy} - \frac{1}{2} gt^2\] \[v_y = v_oy - gt\] \[\vec a = -g (cte)\] Si se lanza hacia abajo: \[y = y_o - v_{oy} - \frac{1}{2} gt^2\] \[v_y = - v_oy - gt\] \[\vec a = -g (cte)\] |
| Ecuación Lanzamiento Horizontal | Es la conposición de un MRU y un MRUA (caída libre) \[x=x_o+ v_xt\]\[v_y=v_{oy} +a_yt\]\[y=y_o +v_ot+\frac{1}{2}at^2\] |
| Lanzamiento de Proyectiles | Este movimiento es el propio de los proyectiles. En el eje x el cuerpo se desplaza a velocidad constante \(v_{ox}\) (mru) y en el eje y con una aceleración constante provocada por la gravedad (mrua) En el punto más alto la velocidad del cuerpo es siempre \(v_{ox}\) (no hay \(v_y\)) Sus ecuaciones son: \(x = (v_ocos\alpha_o)t\) \(y = (v_{oy}sen\alpha_o)t - \frac{1}{2}gt^2\) \(v_x = v_ocos\alpha_o\) \(v_y = v_osen\alpha_o - gt\) |
| Lanzamiento de Proyectiles Altura Máxima | La altura máxima que alcanza un proyectil se obtiene con \(v_y\) = 0 0 = \(v_osen\alpha_o - gt\) Despejando t: \(t = \frac{v_{o}sen\alpha_o}{g}\) Sustituyendo en la ecuación de movimiento: \(y_{máx} = \frac{v_o^2sen^2\alpha_o}{2g}\) Su valor máximo se obtiene con un ángulo de disparo \(\alpha = 90°\) |
| Lanzamientonde Proyectiles Tiempo de Vuelo Alcance Máximo | Para calcular el tiempo de vuelo hay que tener en cuenta y = 0 (cuando el cuerpo llega al suelo) \(0 = v_osen\alpha_ot - \frac{1}{2}gt^2\) Despejando t se obtiene el tiempo de vuelo: \(t = \frac{2v_osen\alpha_o}{g}\) Sustituyendo en la ecuación de la coordenada x: \(x_{máx} = \frac{v_o^2sen2\alpha_o}{g}\) |
| Movimiento Circular Uniforme (MCU) | \(\cdot\)La velocidad angular es constante (ω = cte) \(\cdot\)El vector velocidad es tangente en cada punto a la trayectoria y su sentido es el del movimiento. Esto implica que el movimiento cuenta con aceleración normal \(\cdot\)Tanto la aceleración angular (\(\alpha\)) como la aceleración tangencial (at) son nulas, ya que la rapidez o celeridad (módulo del vector velocidad) es constante \(\cdot\)Existe un periodo (T), que es el tiempo que el cuerpo emplea en dar una vuelta completa. Esto implica que las características del movimiento son las mismas cada T segundos. La expresión para el cálculo del periodo es \(T = \frac{2\pi}{\omega} = \frac{1}{f}\) y es sólo válida en el caso de los movimientos circulares uniformes (m.c.u.) \(\cdot\)Existe una frecuencia (f), que es el número de vueltas que da el cuerpo en un segundo. Su valor es el inverso del periodo |
| Ecuaciones MCU | \(\varphi = \varphi_o + \omega t\) \(\omega = constante \) \(\alpha =0\) |
| MCUA | Es un movimiento de trayectoria circular en la que la \(\alpha\) es constante, el \(\vec v\) es tangente a cada punto de dicha trayectoria y su \(|\vec v |\) varía uniformemente. |
| Ecuaciones MCUA | \(\varphi = \varphi_o + \omega t + \frac{1}{t}\alpha t^2\) \(\omega = \omega_o + \alpha t\) \(\alpha = constante\) \(v_{tan}= \frac{2\pi R}{T}=2\pi Rf\) \(\omega =\frac{2\pi}{T}=2\pi f\) \(v_{tan}= \omega R\) \(a_n= \frac{v_{t}}{R}=\omega^2R=\frac{4\pi^2R}{T^2}\) |
{kind=link}
{kind=link}
Want to create your own Flashcards for free with GoConqr? Learn more.