19301409
Description
Mind Map by cindy uribe, updated more than 1 year ago
|
|
Created by cindy uribe
over 4 years ago
|
|
VECTORES EN R2 Y R3
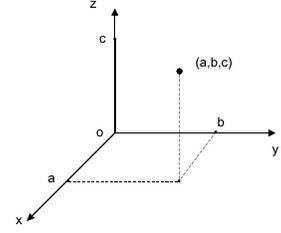
- VECTORES EN R3
- Definimos el conjunto R3
como: R3={(a,b,c) : a, b, c € R}
- Los elementos de este
conjunto se llaman
vectores y los
denotamos por
- Los elementos (a, b, c) € R3
se asocian con puntos en el
espacio tridimensional,
definido con tres rectas
mutuamente
perpendiculares.
- Estas rectas forman los ejes del
sistema de coordenadas
rectangulares
- Estas rectas forman los ejes del
sistema de coordenadas
rectangulares
- Los elementos de este
conjunto se llaman
vectores y los
denotamos por
- Los vectores de R3
tambien se pueden
representar
mediante segmentos
de rectas dirigidos o
flechas. La Norma de
un vector se define
como
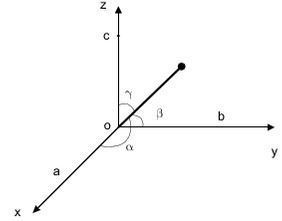
- Los cosenos
directores del vector
= (a, b,) son:
- Donde α, β y ᵞ son angulos directores de
α : ángulo entre y la parte positiva del
eje x, β :ángulo entre y la parte positiva
del eje y, ᵞ: ángulo entre y la parte
positiva del eje z
- Donde α, β y ᵞ son angulos directores de
α : ángulo entre y la parte positiva del
eje x, β :ángulo entre y la parte positiva
del eje y, ᵞ: ángulo entre y la parte
positiva del eje z
- Definimos el conjunto R3
como: R3={(a,b,c) : a, b, c € R}
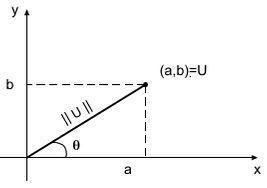
- VECTORES EN R2
- Un vector en el plano es una
pareja ordenada de números
reales (a,b).
- Los números a,b son
llamados componentes del
vector(a,b). Por lo tanto
R2={(a,b): a,b € R}
- Los elementos de R2 son
vectores, los cuales se
representan en el plano
cartesiano mediante puntos.
- Los elementos de R2 son
vectores, los cuales se
representan en el plano
cartesiano mediante puntos.
- Los números a,b son
llamados componentes del
vector(a,b). Por lo tanto
R2={(a,b): a,b € R}
- Definimos la norma o magnitud
de un vector y la denotamos
por: como
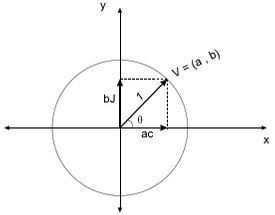
- Se define la dirección de un vector
como el angulo Θ, medido en
radianes que forma el vector con
el lado positivo del eje x.
Escogemos Θ € {0,2π) si
- Un vector en el plano es una
pareja ordenada de números
reales (a,b).
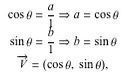
- VECTOR UNITARIO
- Un vector
unitario es un
vector de norma
1:
- De esta
definicion se
tiene que:
- Donde Θ es
llamado angulo
director
- Donde Θ es
llamado angulo
director
- si es un
vector
diferente
de cero,
entonces
es un vector unitario
con la misma
direcccion de
- De esta
definicion se
tiene que:
- Un vector
unitario es un
vector de norma
1:
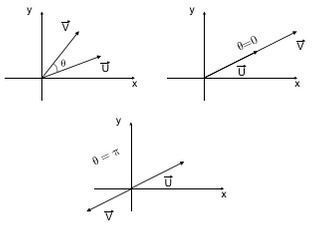
- ANGULO ENTRE VECTORES
- Sean dos vectores
diferentes de cero. El
angulo Θ entre esta
definido como el
angulo no negativo
mas pequeño entre
{0,π}. Si para algun α,
entonces Θ = 0 si α >0
y Θ = π si α <0. Θ=
{0,π}
- Dos vectores diferentes de cero son:
- paralelos si el angulo entre
ellos es cero 0 π
- ortogonales si el angulo
entre ellos es π/2
- paralelos si el angulo entre
ellos es cero 0 π
- Dos vectores diferentes de cero son:
- Sean dos vectores
diferentes de cero. El
angulo Θ entre esta
definido como el
angulo no negativo
mas pequeño entre
{0,π}. Si para algun α,
entonces Θ = 0 si α >0
y Θ = π si α <0. Θ=
{0,π}
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.