20783564
Description
Mind Map by Yury Yizeth Ortiz, updated more than 1 year ago
|
|
Created by Yury Yizeth Ortiz
about 4 years ago
|
|
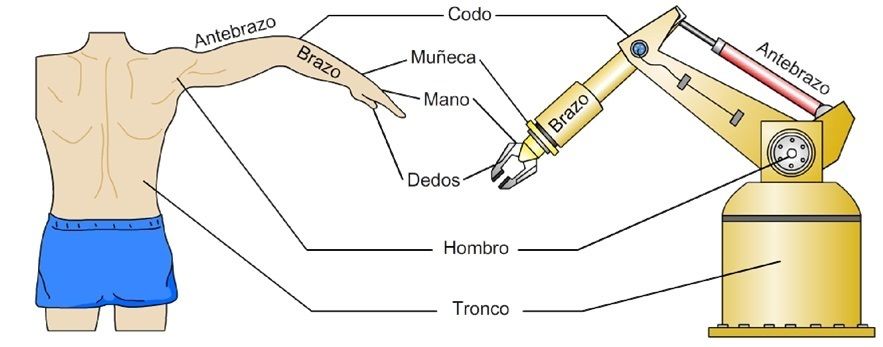
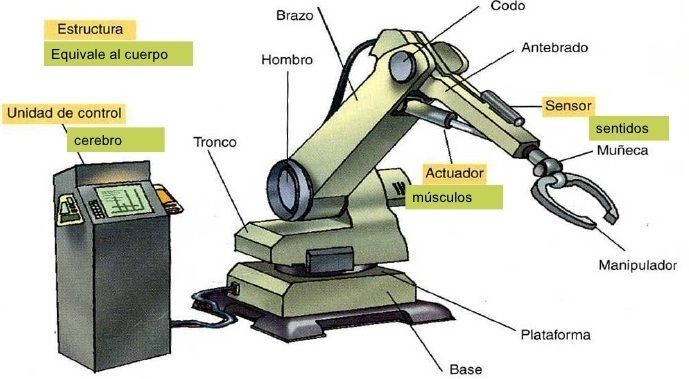
Morfología de los robots
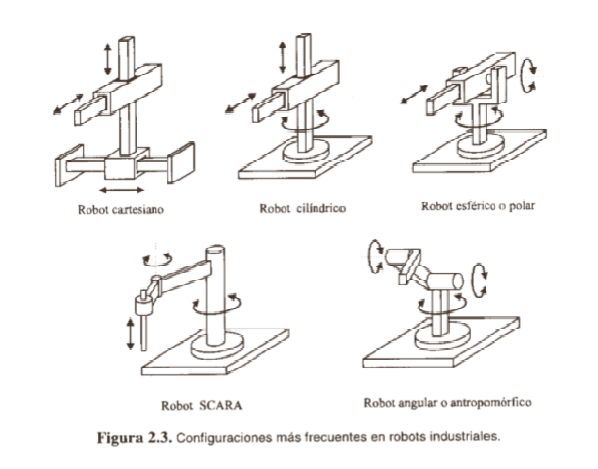
- Estructura mecánica
- Elementos o
eslabones unidos
mediante
articulaciones que
permiten un
movimiento relativo
- Movimientos
- Desplazamiento
- Giro
- Combinación
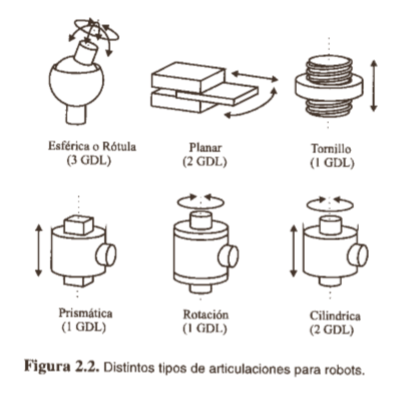
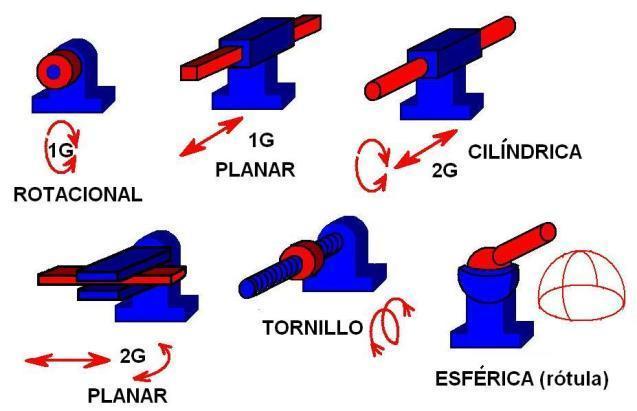
- Tipos de
articulaciones
Annotations:
- Los movimientos generan estas articulaciones
- Movimientos
independientes
- Grados de
libertad GDL
- Viene dado por la suma de los
grados de libertad de las
articulaciones que io
componen
- Para posicionar y
orientar un cuerpo en
el espacio son
necesarios 6
parámetros
- 3 definen
posición
- 3 definen
orientación
- 3 definen
posición
- Para posicionar y
orientar un cuerpo en
el espacio son
necesarios 6
parámetros
- Viene dado por la suma de los
grados de libertad de las
articulaciones que io
componen
- Grados de
libertad GDL
- Desplazamiento
- Movimientos
- Elementos o
eslabones unidos
mediante
articulaciones que
permiten un
movimiento relativo
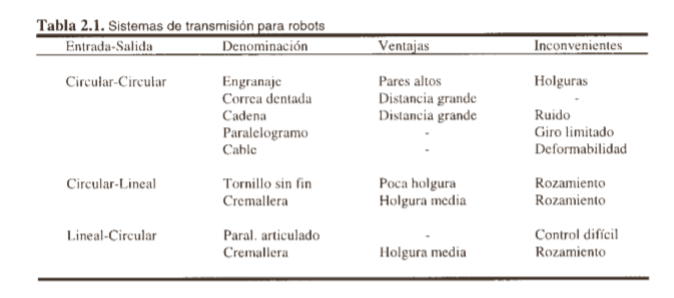
- Transmisiones y
Reductores
- Transmisiones
- Elemento encargado de
transmitir el mov desde los
actuadores has las
articulaciones
- Pueden ser
utilizadas para
convertir mov
circular en lineal o
viceversa
- Pueden ser
utilizadas para
convertir mov
circular en lineal o
viceversa
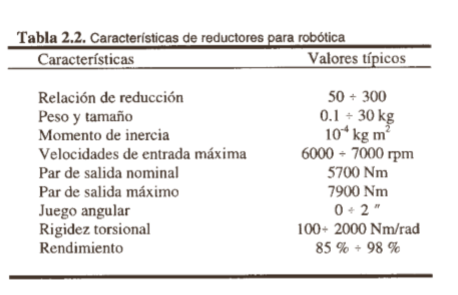
- Deben tener
reducido
peso y
tamaño
- Elemento encargado de
transmitir el mov desde los
actuadores has las
articulaciones
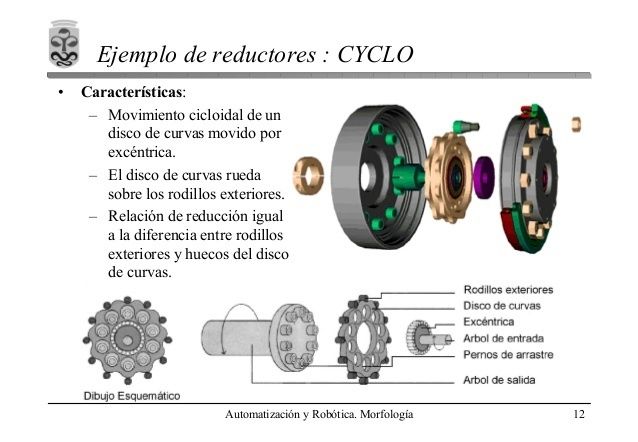
- Reductores
- Encargados de adaptar el
torque y la velocidad de
la salida
- Ventajas
- Disminuye
fricción
- Posicionamiento
rápido y preciso
- Mayor
contrabilidad
- Simplificación de
la mecánica
- Disminuye
fricción
- Desventajas
- Necesidad de motores
especiales, par elevado a
bajas revoluciones con alta
rigidez más caros
- Reducción de la resolución del
codificador de posición,
requiere sensores más
precisos.
- Necesidad de motores
especiales, par elevado a
bajas revoluciones con alta
rigidez más caros
- Ventajas
- Encargados de adaptar el
torque y la velocidad de
la salida
- Transmisiones
- Accionamiento
directo
- Conecta directamente a la carga o
articulaciones sin usar reductor
intermedio
- Ventajas
- Posicionamiento
rápido y preciso
- Evita
rozamiento
- Aumento de
control
- Posicionamiento
rápido y preciso
- Ventajas
- Mayor
problema:
motor a
emplear
- Conecta directamente a la carga o
articulaciones sin usar reductor
intermedio
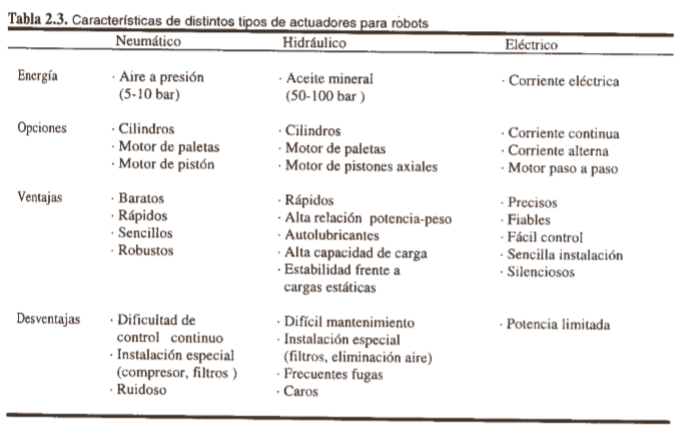
- Actuadores
- Generan el movimiento de
los elementos del robot
según las órdenes dadas
por la unidad de mando
- Neumáticos
- Fuente de
energía es aire
a presión entre
5 y 10 bar
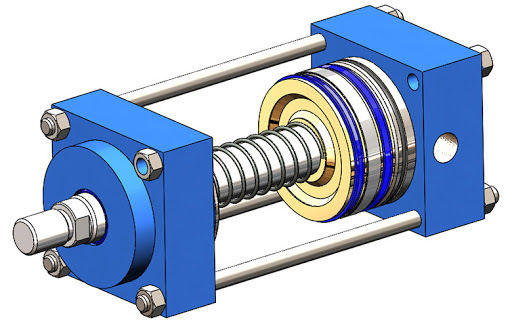
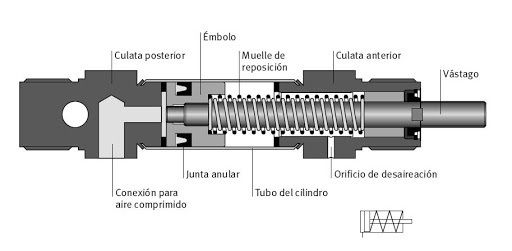
- Cilindros
neumáticos
- Desplazamiento de
un émbolo
encerrado en un
cilindro
- Pueden
ser
- Simple efecto
- El émbolo se desplaza en un sentido
como resultado del empuje ejercido
por el aire a presión, el otro se
desplaza como consecuencia del
efecto de un mueller
- El émbolo se desplaza en un sentido
como resultado del empuje ejercido
por el aire a presión, el otro se
desplaza como consecuencia del
efecto de un mueller
- Doble efecto
- El aire a presión empuja el
émbolo en ambas direcciones
- El aire a presión empuja el
émbolo en ambas direcciones
- Simple efecto
- Desplazamiento de
un émbolo
encerrado en un
cilindro
- Motores
neumáticos
- de aletas
rotativas o
pistones
axiales
- Se consigue el movimiento de
rotacion de un eje mediante aire a
presión
- de aletas
rotativas o
pistones
axiales
- Cilindros
neumáticos
- Fuente de
energía es aire
a presión entre
5 y 10 bar
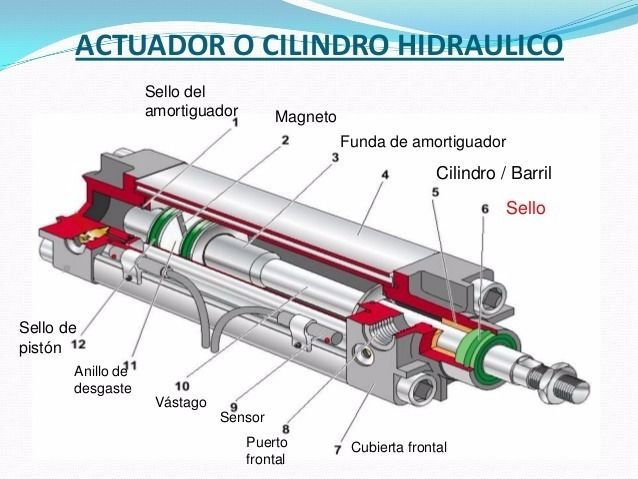
- Hidráulico
- Se utiliza aceites minerales
con una presión entre 50 y
100 bar
- Presenta estabilidad
frente a cargas
estáticas
- Presenta estabilidad
frente a cargas
estáticas
- Posee
características
de
autolubricación y
robustez
- Desventajas
- Existencia de
fugas debido
a las elevadas
presiones
- Instalación
compleja
- Existencia de
fugas debido
a las elevadas
presiones
- Se utiliza aceites minerales
con una presión entre 50 y
100 bar
- Eléctrico
- Mayor control,
sencillez y
precisión
- Motores de
corriente
continua
DC
- Constituidos
por dos
devanados
internos
- Inductor
- Crea un campo
magnético de
dirección fija
- Crea un campo
magnético de
dirección fija
- Inducido
- Recibe la
corriente del
exterior
- Recibe la
corriente del
exterior
- Inductor
- Constituidos
por dos
devanados
internos
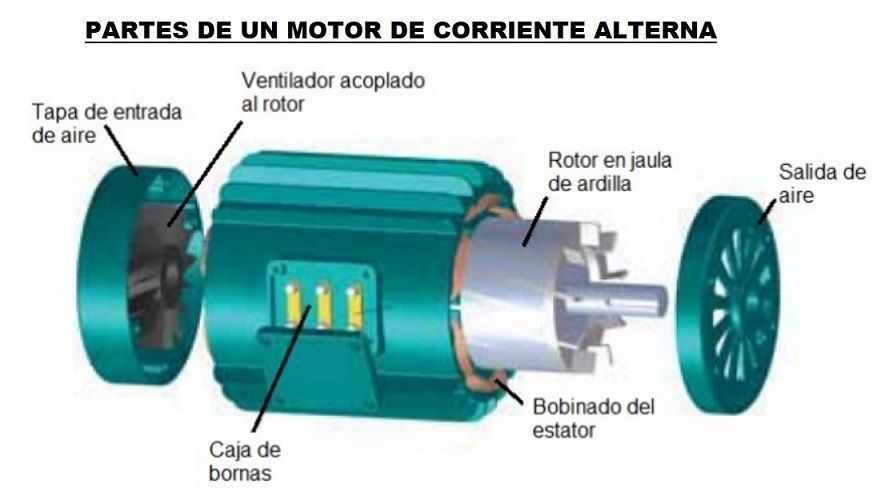
- Motores de
corriente
alterna AC
- Motores
síncronos
- La velocidad de giro
depende de la
frecuencia de
tensión que alimenta
el inducido
- La velocidad de giro
depende de la
frecuencia de
tensión que alimenta
el inducido
- Motores
asíncronos
- Motores
síncronos
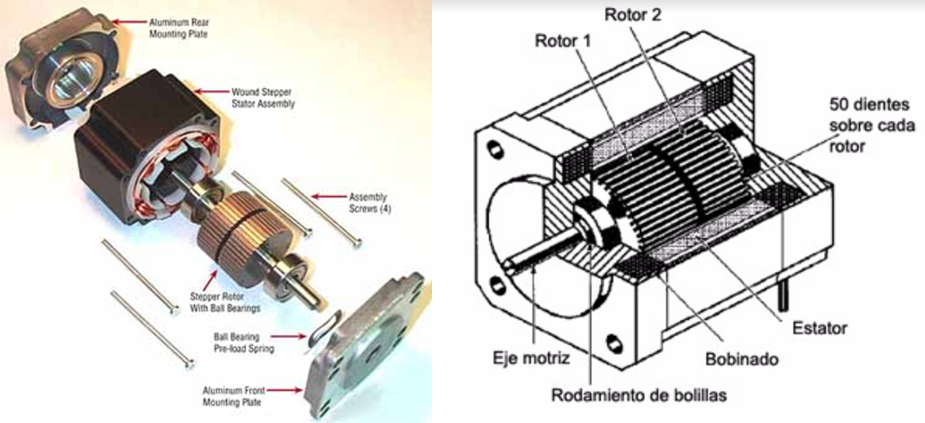
- Motores
paso a
paso
- De imanes
permanentes
- El rotor gira para
orientar sus polos de
acuerdo al campo
magnético creado por
las fases del estator
- El rotor gira para
orientar sus polos de
acuerdo al campo
magnético creado por
las fases del estator
- De
reluctancia
variable
- Rotor formado por
material
ferromagnético
- Rotor formado por
material
ferromagnético
- Híbridos
- De imanes
permanentes
- Mayor control,
sencillez y
precisión
- Neumáticos
- Generan el movimiento de
los elementos del robot
según las órdenes dadas
por la unidad de mando
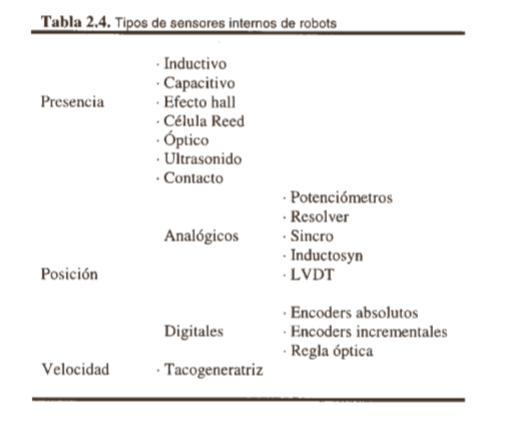
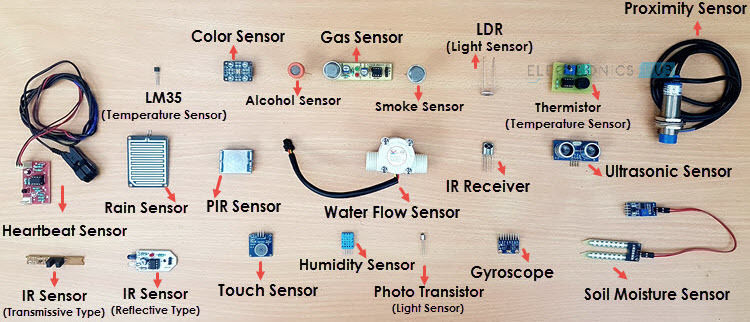
- Sensores
internos
- Información
relacionada con su
estado (posición de
articulaciones)
- Se dividen en
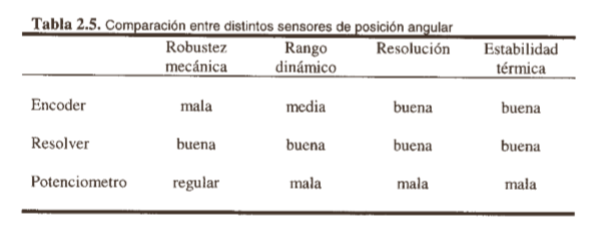
- Sensores de
posición
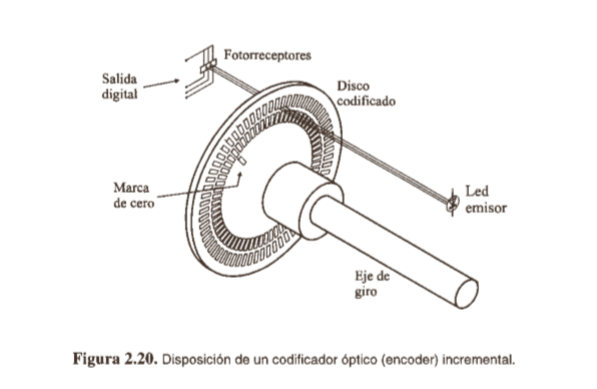
- Codificadores
angulares de
posición
(Encoders)
- Su resolución depende
del número de marcas
que se pueden poner
físicamente en el disco
- Presentan
problemas
mecánicos
- Su resolución depende
del número de marcas
que se pueden poner
físicamente en el disco
- Captadores
angulares de
posición
(Sincro-revolvers)
- Resolución
teóricamente
infinita
- Resolución
teóricamente
infinita
- Sensor
lineal de
posición
- Su funcionamiento
se basa en la
utilización de un
núcleo de material
ferromagnetico
- Su funcionamiento
se basa en la
utilización de un
núcleo de material
ferromagnetico
- Codificadores
angulares de
posición
(Encoders)
- Sensores de
velocidad
- La captación de
velocidad es necesaria
para mejorar el
comportamiento
dinámico de los
actuadores del robot
- La captación de
velocidad es necesaria
para mejorar el
comportamiento
dinámico de los
actuadores del robot
- Sensores de
presencia
- Detecta la presencia
de un objeto dentro
de un radio de
acción determinado
- Con contacto
- A través de un
interruptor
- A través de un
interruptor
- Sin contacto
- Se usan principios físicos
- Se usan principios físicos
- Con contacto
- Detecta la presencia
de un objeto dentro
de un radio de
acción determinado
- Sensores de
posición
- Información
relacionada con su
estado (posición de
articulaciones)
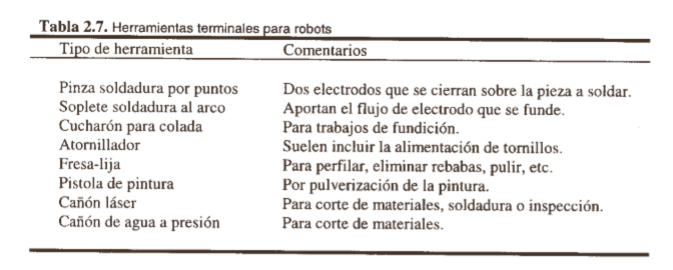
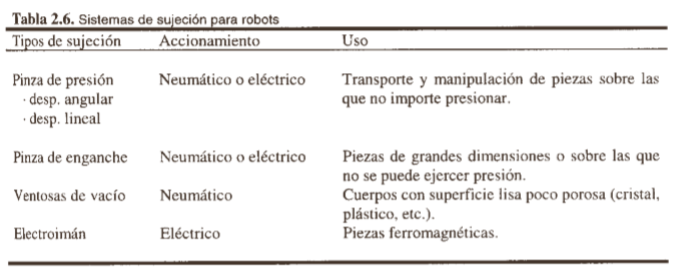
- Elementos
terminales
- Interaccionan
directamente
con el entorno
del robot
- Interaccionan
directamente
con el entorno
del robot
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.