3198694
Description
Mind Map by Johann Andrés Argüello CRUZ, updated more than 1 year ago
|
|
Created by Johann Andrés Argüello CRUZ
over 8 years ago
|
|
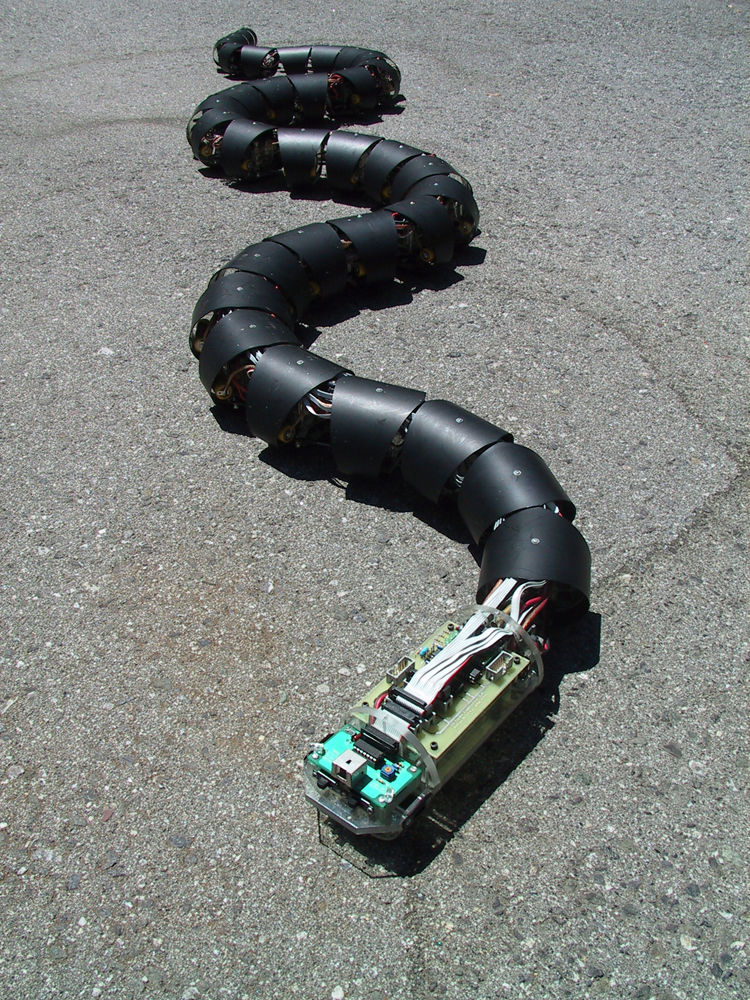
HYPER-REDUNDANT ROBOT
- CHARACTERISTICS
- Are not anthropomorphic
- Highly linkage structure
- Maneuvering in confined spaces
- Peristaltic waves generated
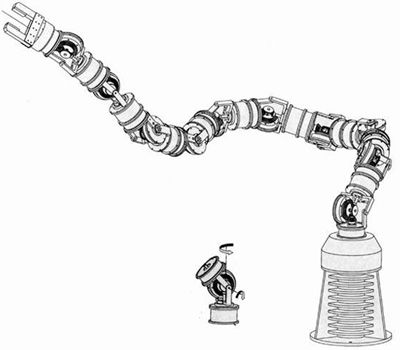
- Grasp Objects in a Tentacle-Like Fashion
- Are not anthropomorphic
- IMPLEMENTATION
- 30 DOF Robot VGT
- 10 Identical 3 DOF Truss Modules
- 3 Prismatic Joints
- D.C. Servo Motors and Lead Screw Drives
- Linear Potentiometer
- D.C. Servo Motors and Lead Screw Drives
- 3 Prismatic Joints
- Casters Attached to the Fixed Elements of the Modules
- can be separated into two robot manipulators 15 DOF
- System is Controlled by an a Multiprocessing Computer
- Heurikon 68030
- Heurikon 68030
- mechanical advantage properties
- Gregory S. Chirikjian
Joel W. Burdick
- 10 Identical 3 DOF Truss Modules
- 30 DOF Robot VGT
- APPLICATIONS
- Medical Endoscopy
- Capturing and Despinning Free Floating Satellites
- Complex Whole Arm Manipulation Experiments
- Emergency Response Vehicles in Collapsed Buildings
- Sensor Placement in Complicated Geological Formations
- Medical Endoscopy
- DISADVANTAGES
- Precise Positioning Tasks
- Not Provide Backbone Torque
- Precise Positioning Tasks
- MORPHOLOGY
- Continuous Morphology
- Deformable Continuous
- Deformable Continuous
- Discrete Morphology
- Rigid Links
- Rigid Links
- Cascades of Parallel Platform Modules
- Variable Geometry Trusses (VGT)
- Variable Geometry Trusses (VGT)
- Continuous Morphology
- UNIVERSIDAD MANUELA BELTRÁN
ING. ELECTRÓNICA
- JOHANN ANDRÉS ARGÜELLO CRUZ
ROBÓTICA INDUSTRIAL
- JOHANN ANDRÉS ARGÜELLO CRUZ
ROBÓTICA INDUSTRIAL
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.