4367662
Description
Mind Map by Carlos Ruano Quiroz, updated more than 1 year ago
|
|
Created by Carlos Ruano Quiroz
about 8 years ago
|
|
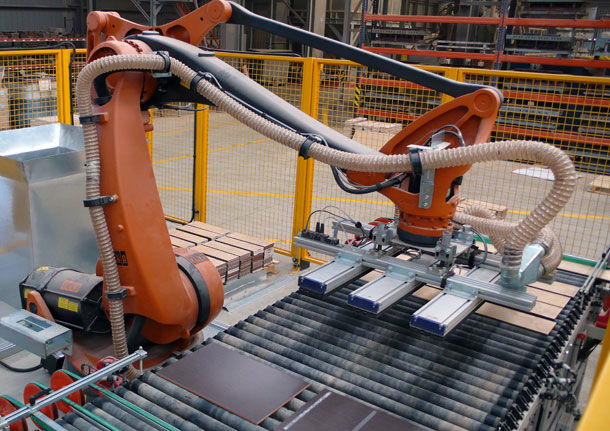
Requerimientos de un Sistema de
Programación de robots
- Estructuración
- Entorno de programación.
- Contar con un entorno de programación adecuado a las
necesidades.
- Programar las acciones de un manipulador es complicado.
- Presente una buena capacidad de depuración y de ejecución
paso a paso.
- Presente una buena capacidad de depuración y de ejecución
paso a paso.
- Programar las acciones de un manipulador es complicado.
- Contar con un entorno de programación adecuado a las
necesidades.
- Modelado del entorno.
- El modelo del entorno es la representación que tiene el
robot de los objetos con los que interacciona.
- Los modelos se limita a características geométricas:
posición y orientación de los objetos, y en ocasiones a su
forma, dimensiones, peso, etc.
- Los modelos se limita a características geométricas:
posición y orientación de los objetos, y en ocasiones a su
forma, dimensiones, peso, etc.
- El modelo del entorno es la representación que tiene el
robot de los objetos con los que interacciona.
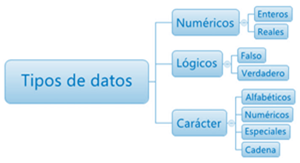
- Tipo de datos.
- Tipo de dato lógico
Tipo de dato entero
Tipo de dato carácter
Cadena de caracteres
- Tipo de dato lógico
Tipo de dato entero
Tipo de dato carácter
Cadena de caracteres
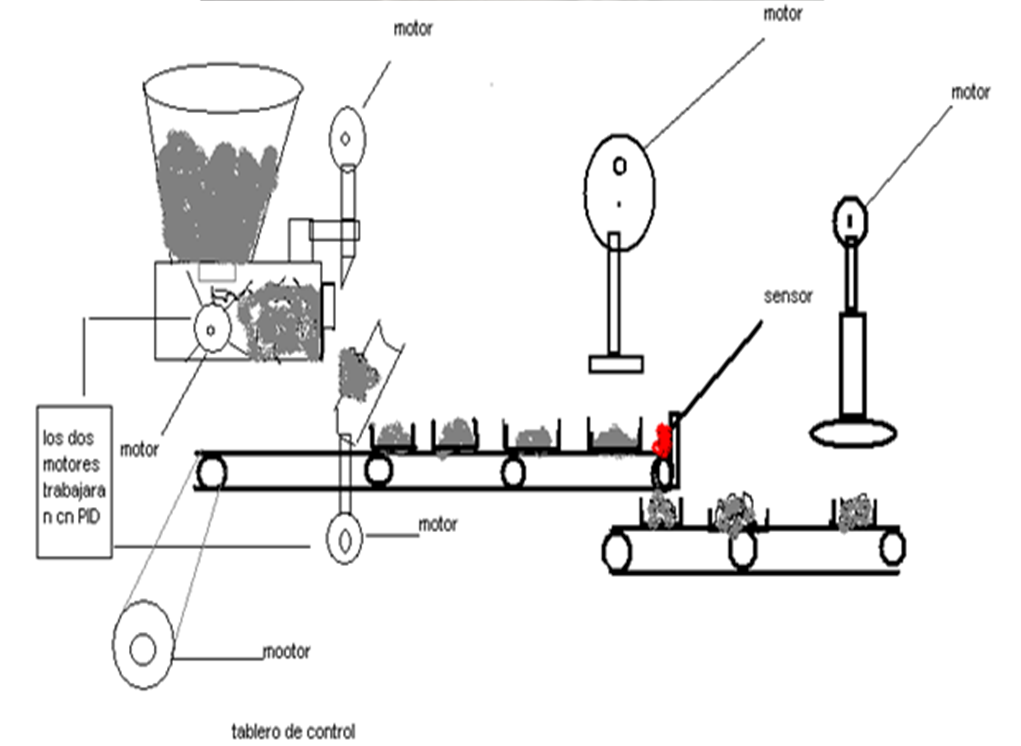
- Manejo de
entradas/salidas
(digital y analógica).
- La comunicación del robot con otras máquinas o
procesos que operan con él, es fundamental para
conseguir su integración y sincronización en los
procesos de fabricación.
- Otra aplicación importante de las
entradas-salidas del robot (ya sean
digitales o análogas), es la integración de
sensores, incorporando la información
de éstos al desarrollo de la tarea. Los
sensores permiten ante todo realizar
determinadas aplicaciones en un
entorno no conocido de forma total sin
tener que utilizar herramientas
especiales
- Otra aplicación importante de las
entradas-salidas del robot (ya sean
digitales o análogas), es la integración de
sensores, incorporando la información
de éstos al desarrollo de la tarea. Los
sensores permiten ante todo realizar
determinadas aplicaciones en un
entorno no conocido de forma total sin
tener que utilizar herramientas
especiales
- La comunicación del robot con otras máquinas o
procesos que operan con él, es fundamental para
conseguir su integración y sincronización en los
procesos de fabricación.
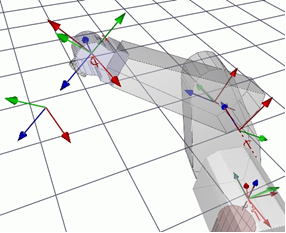
- Control de
movimiento.
- Las trayectorias de un robot pueden ser
punto a punto, coordinadas o trayectoria
continua, este último caso incluye la línea
recta, interpolación circular y otras.
- Las trayectorias de un robot pueden ser
punto a punto, coordinadas o trayectoria
continua, este último caso incluye la línea
recta, interpolación circular y otras.
- Control del flujo de ejecución del
programa.
- Al igual que en cualquier lenguaje de
programación de propósito general, un lenguaje
de programación de robots permite al
programador especificar de alguna manera un
flujo de ejecución de operaciones.
- Al igual que en cualquier lenguaje de
programación de propósito general, un lenguaje
de programación de robots permite al
programador especificar de alguna manera un
flujo de ejecución de operaciones.
- Entorno de programación.
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.