18611760
Descrição
Mapa Mental por Raúl Martín Rubio, atualizado more than 1 year ago
|
|
Criado por Raúl Martín Rubio
mais de 6 anos atrás
|
|
ROBÓTICA
- 1-Introducción.
- Mecanica
- Análisis estática
- Diseño
- Análisis dinámico
- Análisis estática
- Eléctrica
- Electrónica
- información microelectronica que
crea impulsos eléctricos
- información microelectronica que
crea impulsos eléctricos
- Informática
- Programas infórmaticos coordinan movimientos
- Programas infórmaticos coordinan movimientos
- Mecanica
- 2-Contexto
- Robot Unimate esférico paletizando GE
- Famulus
- Puma
- Mayormente son eléctricos con multiprocesador
- Pueden ser programados manualmente,es mas rápido, se basa en sensores
- Baxter
- Tareas carga,almacenaje
- Tareas carga,almacenaje
- Yumi
- Futuro de la Robótica
- Automatización montaje logístico
- Entornos trabajo: Hombre-Robot
- Uso
Wireless
- Estandarizar tecnología Ethernet
- Potenciar sistemas Plug Play
- Automatización montaje logístico
- Robot Unimate esférico paletizando GE
- 3-Mercado actual
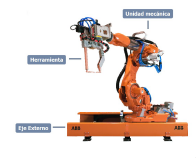
- ABB
- EPSON
- HYUNDAI
- KUKA
- MITSUBISHI
- UNIVERSAL ROBOTS
- YAMAHA
- ABB
- 4-Que se entiende por robot industrial?
- RIA: Manipulador multifuncional reprogramable
- Desplaza piezas,hace
tareas
- Desplaza piezas,hace
tareas
- swira
- Maquina manipuladora controlada,reprogramable, multiproposito para aplicaciones industriales
- Maquina manipuladora controlada,reprogramable, multiproposito para aplicaciones industriales
- AFRI
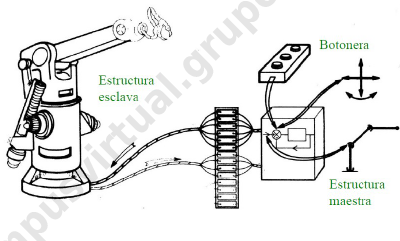
- Telemanipuladores
- Manual o Telemando
- Manual o Telemando
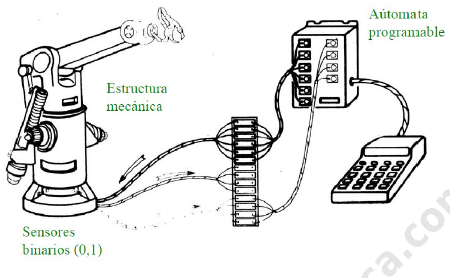
- Manipuladores Prereglados
- Mediante Fines de carrera o PLC
- Mediante Fines de carrera o PLC
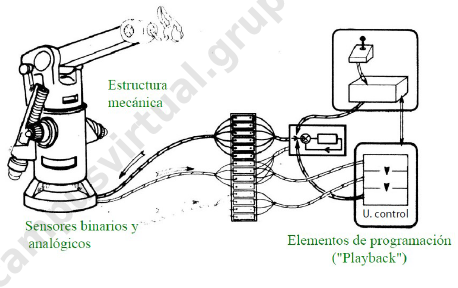
- Programables
- 1ª Gración..Continua o punto a punto
- 1ª Gración..Continua o punto a punto
- Inteligentes
- 2º Gen....Adquiere datos externos y adapta su
tarea
- 2º Gen....Adquiere datos externos y adapta su
tarea
- Telemanipuladores
- RIA: Manipulador multifuncional reprogramable
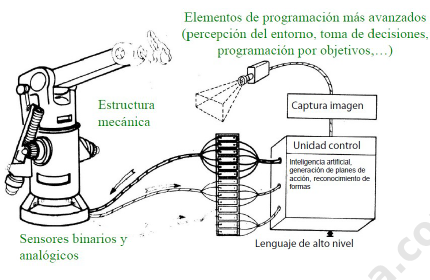
- 5-Elementos de un sistema robótico
- Manipulador o Brazo
- Controlador
- Entradas y salidas.Pistola de programación
- Unidad Potencia
- Suministra energía a actuadores, en forma de amplificador,compresor o bomba.
- Suministra energía a actuadores, en forma de amplificador,compresor o bomba.
- Sistema sensorial: informan al controlador sobre el estado del manipulador
- Sensores internos
- Informan posición,velocidad,aceleración
de cada articulación,se conecta al eje del
actuador
- Informan posición,velocidad,aceleración
de cada articulación,se conecta al eje del
actuador
- sensores externos
- Informan sobre el estado del robot, y su entorno,detectan obstaculos,
piezas, seguridad,no todos los llevan, los sistemas de visión y de distancia
son sensores externos
- Informan sobre el estado del robot, y su entorno,detectan obstaculos,
piezas, seguridad,no todos los llevan, los sistemas de visión y de distancia
son sensores externos
- Sensores internos
- Manipulador o Brazo
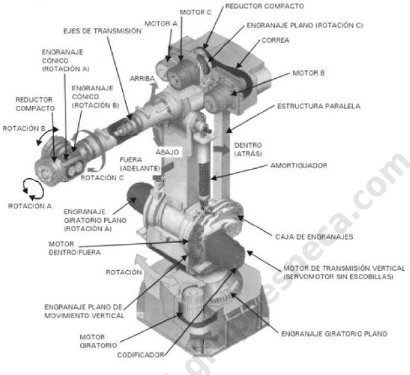
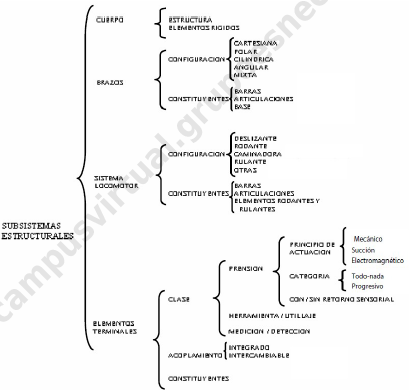
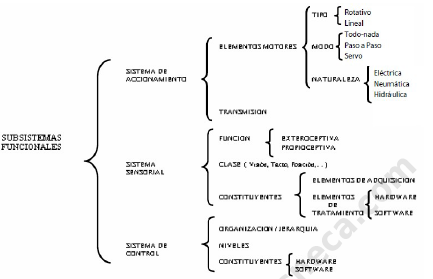
- 6-Subsistemas de un
robot
- Estructurales
- Funcionales
- Estructurales
- 7-Tareas
desempeñadas
- Mas velocidad de producción, facilita
repetición automática de movimientos
- Menos tiempos muertos y mas producción
- Mas tareas sin cambiar el programa
- mejor calidad d productos, mejor precisión
- Disminuye mano de obra directa
- Ahorra materia prima y energía
- Evita tareas penosas al hombre
- Duras, insalubres, incómodas, monotonas
- Duras, insalubres, incómodas, monotonas
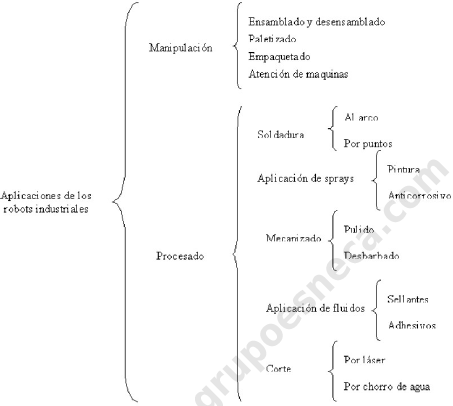
- Aplicaciones mas comunes de los Robots
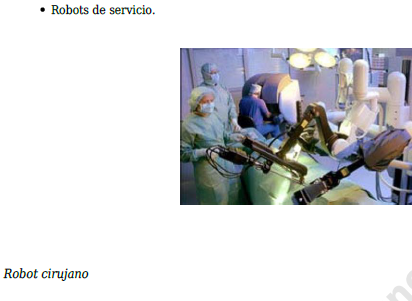
- Usos especiales
- Mas velocidad de producción, facilita
repetición automática de movimientos
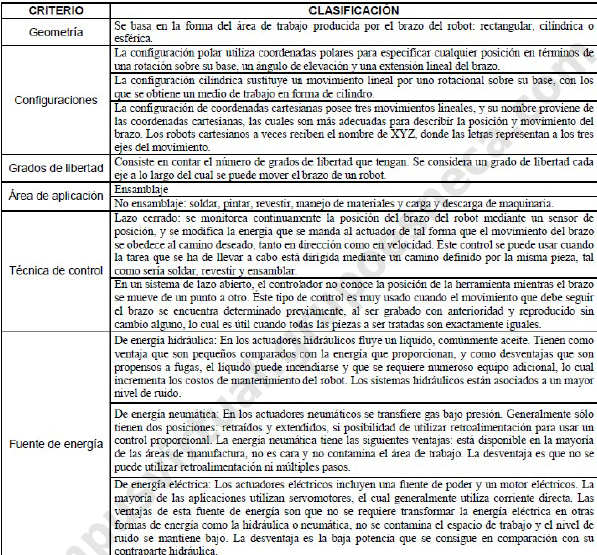
- 8-Clasificación de
robots
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.