1130463
Beschreibung
Mindmap von andrea-pau78, aktualisiert more than 1 year ago
|
|
Erstellt von andrea-pau78
vor fast 10 Jahre
|
|
Clases de robots
- Morfologia
- Manipuladores poliaticulados
Anmerkungen:
- Básicamente se trata de brazos de robot sedentarios, configurados para mover sus elementos terminales (pinzas de sujeción, herramientas, elementos de soldadura...) en un determinado espacio de trabajo, según uno o más sistemas de coordenadas.
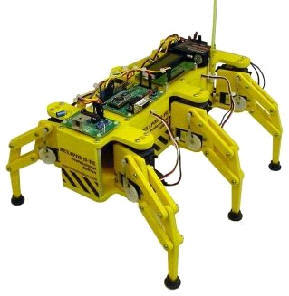
- Moviles
Anmerkungen:
- Provistos de ruedas, orugas o extremidades que les permiten desplazarse de acuerdo a la información que reciben a través de sus sistemas de sensores y a su programación. Algunos, denominados zoomórficos, se caracterizan por sistemas de locomoción que imitan a diversos seres vivos. Se utilizan en experimentación con vistas al desarrollo posterior de vehículos pilotados o autónomos, capaces de evolucionar en superficies muy accidentadas. Los robots androides, de locomoción bípeda, intentan reproducir la forma y el comportamiento cinemático del ser humano. Están relativamente poco evolucionados y se destinan fundamentalmente al estudio y la experimentación.
- Híbridos
Anmerkungen:
- Robots de difícil clasificación, cuya estructura consiste en la combinación de alguna de las anteriores, bien sea por conjunción o por yuxtaposición.
- Manipuladores poliaticulados
- Procedimiento de control
- No servo-controlados
Anmerkungen:
- Son aquéllos en los que cada parte móvil tiene un número fijo de posiciones con topes, normalmente dos, y sólo se desplazan hasta situarse en ellos. Suelen ser de tipo neumático y resultan considerablemente rápidos y precisos.
- Servo-controlados
Anmerkungen:
- Cada elemento móvil cuenta con un sensor de posición, lineal o angular. La señal de éste se envía al sistema de control, que genera la orden de movimiento adecuada para el motor. Pueden ser detenidos en cualquier punto.
- Servo-controladas punto a punto
Anmerkungen:
- Para controlarlos únicamente se les indican las posiciones inicial y final de la trayectoria. El sistema de control calcula la trayectoria necesaria con unos algoritmos diseñados a tal efecto. Son capaces de memorizar posiciones.
- No servo-controlados
- Aplicación
- De producción industrial
Anmerkungen:
- Se usan para la manufactura de productos. Pueden ser de manipulación (en fundición, moldeado, forja, tratamientos térmicos, etc.), de soldadura, pintura, mecanizado, montaje, almacenamiento y control de calidad.
- De servicio
Anmerkungen:
- Se trata de robots que operan autónoma o semiautónomamente para proporcionar servicios útiles a seres humanos o a otros equipamientos, excluyendo operaciones de manufactura. Se pueden clasificar a su vez en robots que proporcionan.
- Servicios humanos
Anmerkungen:
- medicina, seguridad, entretenimiento, etc. El uso de robots en cirugía descarga al cirujano de ciertas tareas mecánicas y aumenta la precisión de ciertas intervenciones. También se usan robots en rehabilitación, como ayuda a discapacitados. Pueden constituir una prolongación de su anatomía o sustituir la función del órgano perdido.
- Servicio de equipamento
Anmerkungen:
- mantenimiento, reparaciones, limpieza, etc.
- Otras funciones autónomas
Anmerkungen:
- investigación y exploración, vigilancia, transporte, adquisición de datos, etc., y otros robots que no pueden ser clasificados en las dos categorías anteriores.
- De producción industrial
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.