19491096
Beschreibung
Mindmap von Andres Felipe Rodriguez Reyes, aktualisiert more than 1 year ago
|
|
Erstellt von Andres Felipe Rodriguez Reyes
vor mehr als 6 Jahre
|
|
ROBOT NXT
- conexiones
- Conexión de los sensores
- se pueden conectar en cualquier entrada,con
cualquier cable excepto el conversor
- configuracion predeterrminada: Puerto 1: Sensor táctil
Puerto 2: Sensor acústico Puerto 3: Sensor fotosensible
Puerto 4: Sensor ultrasónico
- configuracion predeterrminada: Puerto 1: Sensor táctil
Puerto 2: Sensor acústico Puerto 3: Sensor fotosensible
Puerto 4: Sensor ultrasónico
- se pueden conectar en cualquier entrada,con
cualquier cable excepto el conversor
- Conexión de los motores y las lámparas
- se pueden conectar en cualquier
puerto a,b,yc
- La configuración predeterminada es:Puerto A: Motor o lámpara
para una función extra Puerto B: Motor para movimiento; para un
chasis de doble motor, generalmente este es el lado izquierdo.
Puerto C: Motor para movimiento; para un robot de dos motores,
generalmente este es el lado derecho.
- La configuración predeterminada es:Puerto A: Motor o lámpara
para una función extra Puerto B: Motor para movimiento; para un
chasis de doble motor, generalmente este es el lado izquierdo.
Puerto C: Motor para movimiento; para un robot de dos motores,
generalmente este es el lado derecho.
- se pueden conectar en cualquier
puerto a,b,yc
- Carga y descarga de archivos
- se puede hacer por
Bluetootho por cable usb
- se puede hacer por
Bluetootho por cable usb
- Conexión de los sensores
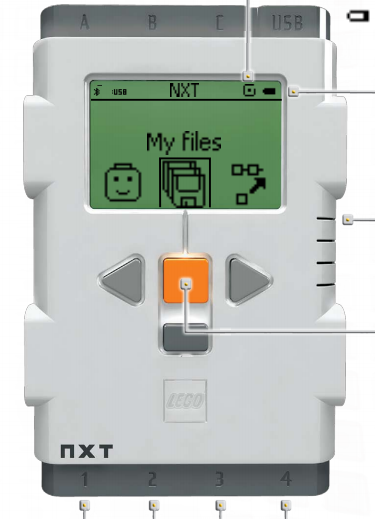
- interfaz
- El ladrillo NXT es el cerebro del robot y es
manejado por computador
- contiene:Icono de funcionamiento,Nivel de
batería,Altavoz,Botones del NXT,Puertos de
entrada
- muestra:Nombre del NXT,Mis archivos,Programa
NXT,Pruébeme,Registro de datos de
NXT,Ver,Configuración,Bluetooth: menú principal del NXT
- contiene:Icono de funcionamiento,Nivel de
batería,Altavoz,Botones del NXT,Puertos de
entrada
- El ladrillo NXT es el cerebro del robot y es
manejado por computador
- componentes
- Sensor táctil
- este detecta cuando esta presionado o no
- este detecta cuando esta presionado o no
- Sensor acústico
- este detecta todo tipo de sonidos
- este detecta todo tipo de sonidos
- Sensor fotosensible
- este distingue la
luminosidad en el area
- este distingue la
luminosidad en el area
- Sensor ultrasónico
- detecta los objetos o distancia
libre para recorrer
- detecta los objetos o distancia
libre para recorrer
- Servomotor interactivo
- este le da la capacidad
de desplazamiento
- este le da la capacidad
de desplazamiento
- Lámparas
- tiene distintas
funciones,dan luz
- tiene distintas
funciones,dan luz
- Sensor táctil
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.