7103687
Beschreibung
Mindmap von Carlos CAÑARES, aktualisiert more than 1 year ago
|
|
Erstellt von Carlos CAÑARES
vor etwa 9 Jahre
|
|
ROBÓTICA
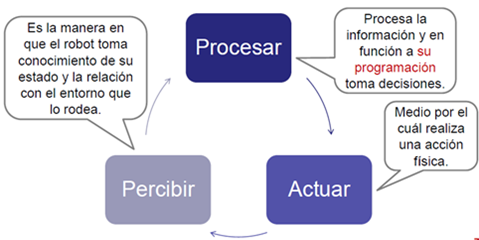
- La robótica es la ciencia encaminada a diseñar y construir aparatos y sistemas capaces de realizar
tareas propias de un ser humano.
- TIPOS DE ROBOT
- X
- Generaciones
- 1.Manipuladores. 2-
Robots de aprendizaje.
3- Robots con control
sensorizado. 4- Robots
inteligentes.
- 1.Manipuladores. 2-
Robots de aprendizaje.
3- Robots con control
sensorizado. 4- Robots
inteligentes.
- X
- Clasificados Por Grado De Autonomía Clasificados Por Tipo De Propósito Clasificados Por Funcion
Clasificados Por Medio Clasificados Por Tamaño (Y Peso) Clasificados Por Anatomía O Característica
Clasificados Por Metodología De Diseño Clasificados Por Tipo De Inteligencia
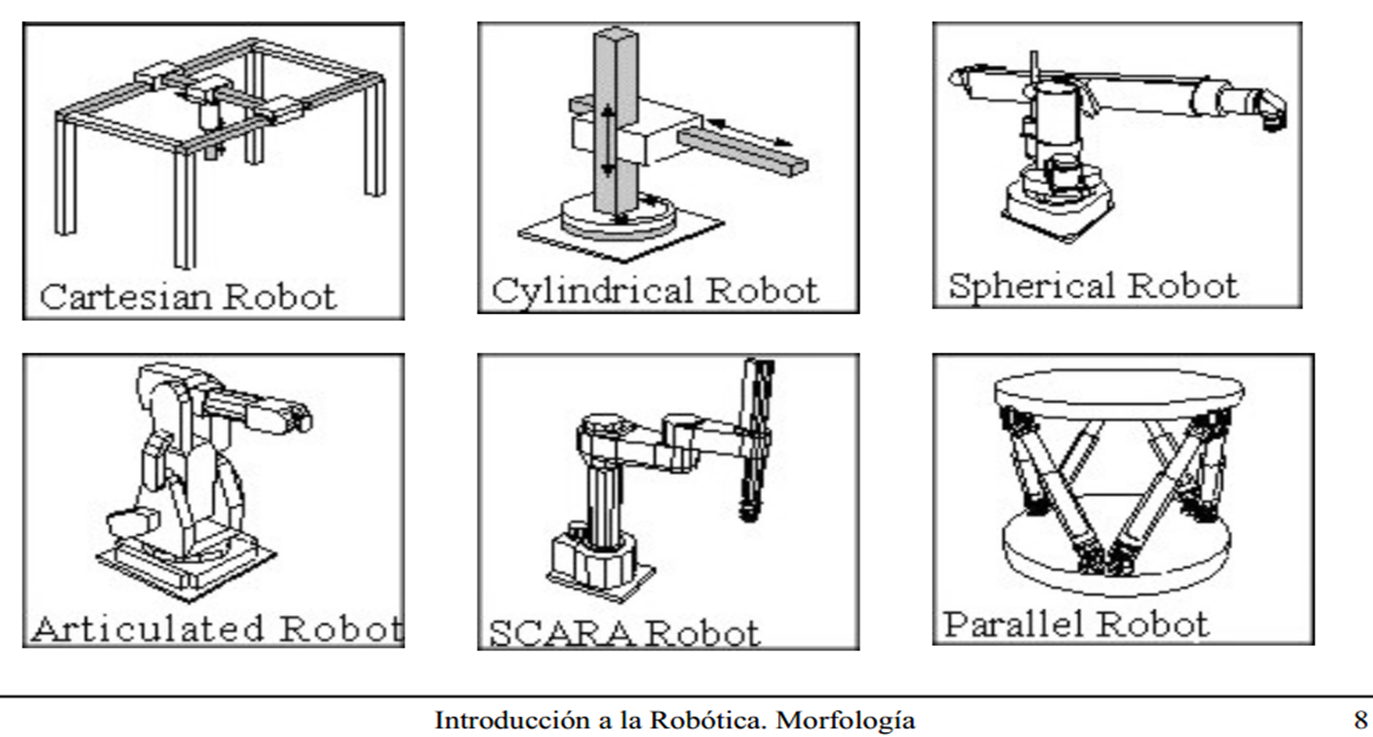
- Arquitectura
- La arquitectura, es definida por el tipo de configuración general del Robot, puede ser metamórfica.
Metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un
Robot a través del cambio de su configuración por el propio Robot. Se clasifican en: 1.-Poliarticulados,
2.-Móviles, 3.-Androides, 5.-Zoomórficos e Híbridos
- MORFOLOGÍA DEL ROBOT
- 1.-Estructura Mecánica
2.-Transmisiones
3.-Sistema de
Accionamiento 4.-
Sistema Sensorial
5.-Sistema de Control
6.-Elementos Terminales
- Características estructurales
- 1. Número de
articulaciones
2. Características
geométricas y
mecánicas de los
eslabones
3. Emplazamiento de
accionamientos
4. Rigidez estructural
5. Frecuencia de
resonancia 6. Rango
articular 7. Volumen
de trabajo
8. Accesibilidad
- 1. Número de
articulaciones
2. Características
geométricas y
mecánicas de los
eslabones
3. Emplazamiento de
accionamientos
4. Rigidez estructural
5. Frecuencia de
resonancia 6. Rango
articular 7. Volumen
de trabajo
8. Accesibilidad
- 1.-Estructura Mecánica
2.-Transmisiones
3.-Sistema de
Accionamiento 4.-
Sistema Sensorial
5.-Sistema de Control
6.-Elementos Terminales
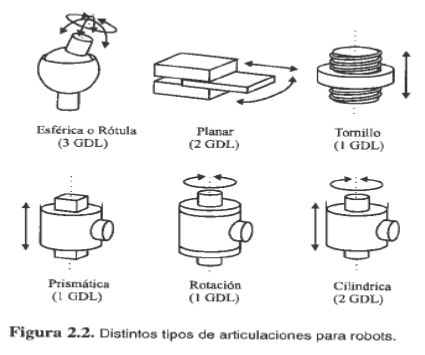
- ESTRUCTURA MECÁNICA DE UN ROBOT
- Un Robot está constituido por una serie
de elementos o eslabones unidos
mediante articulaciones que permiten
un movimiento relativo entre cada dos
eslabones consecutivos.
- x
- x
- x
- Un Robot está constituido por una serie
de elementos o eslabones unidos
mediante articulaciones que permiten
un movimiento relativo entre cada dos
eslabones consecutivos.
- La arquitectura, es definida por el tipo de configuración general del Robot, puede ser metamórfica.
Metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un
Robot a través del cambio de su configuración por el propio Robot. Se clasifican en: 1.-Poliarticulados,
2.-Móviles, 3.-Androides, 5.-Zoomórficos e Híbridos
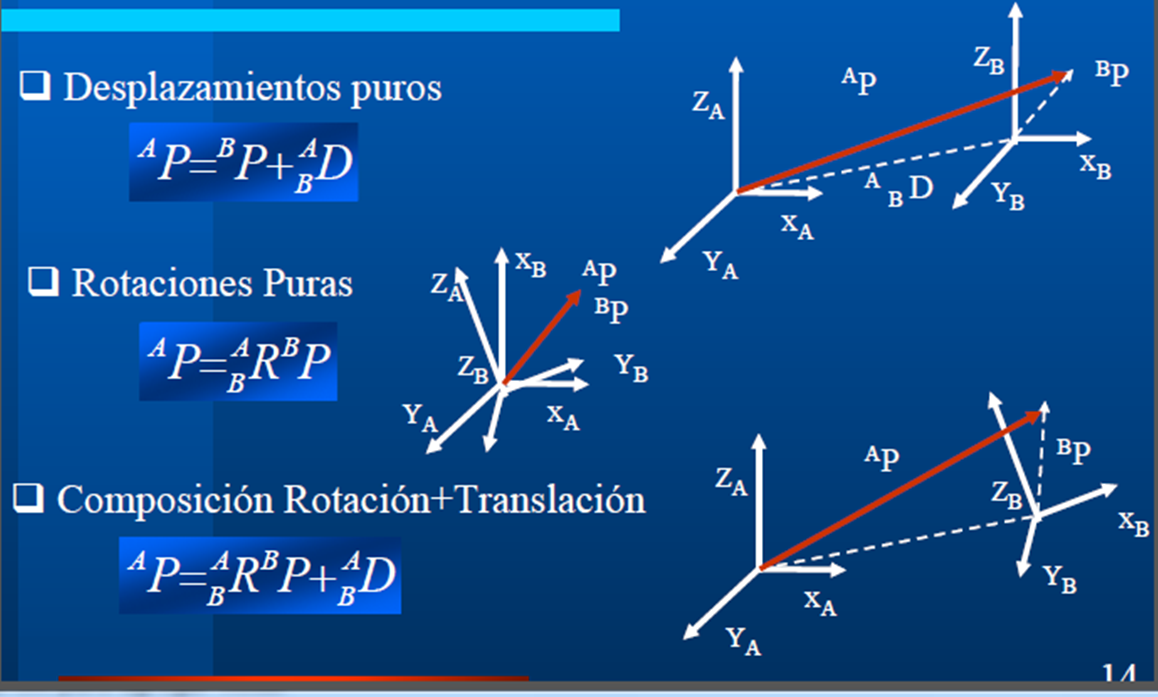
- Herramientas Matemáticas
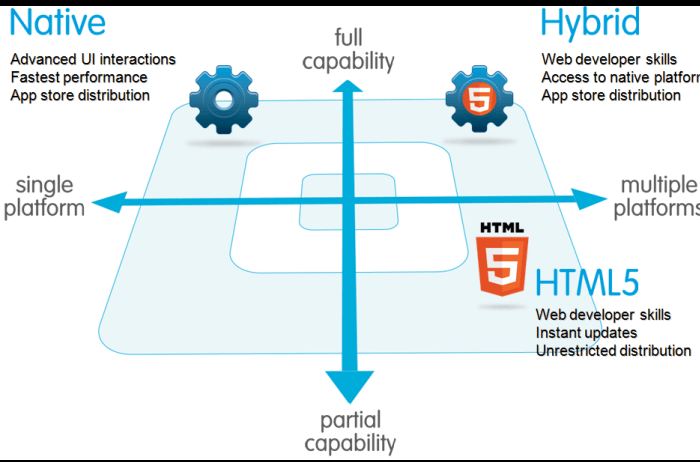
- Apps nativas e hibridas
- MATRIZ JACOBIANA
- La matriz Jacobiana es una matriz
formada por las derivada parciales de
primer orden de una función. Una de las
aplicaciones más interesantes de esta
matriz es la posibilidad de aproximar
linealmente a la función en un punto. En
este sentido, el Jacobiano representa la
derivada de una función multivariable
- La matriz Jacobiana es una matriz
formada por las derivada parciales de
primer orden de una función. Una de las
aplicaciones más interesantes de esta
matriz es la posibilidad de aproximar
linealmente a la función en un punto. En
este sentido, el Jacobiano representa la
derivada de una función multivariable
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.