Flashcards on Lecture 1, euler lagrange modelling, created by Jacob Brændstrup on 09/06/2023.
|
|
Created by Jacob Brændstrup
almost 3 years ago
|
|
Close
|
|
Created by Jacob Brændstrup
almost 3 years ago
|
|
What is the euler lagrange equation?
What is the euler lagrange method?
What are generalized coordinates?
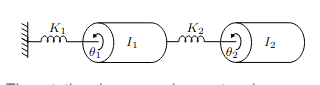
Can you give an example of the the dynamics for this system?
Can you give an example of the energy equations for this system and the lagrangian?
What does the lagrangian look like if ge the system is not conservative?
What is the equation for potential energy for a robot with n links?
What is this equation for
How can you describe the systems gravity vector from its energys?
How can you write the lagrangian in terms of the systems energys?
How can you describe the dynamical model of a robot subject to external wrench at the end effector?
What does the geometric jacobian desc
How do you derive the geometric jacobian for a revolute joint?
Given the potential energy of each link, how do you find the entire systems potential energy?
Given the kinetic energy of each link, how can you compute the kinetic energy for the entire system?
How do you express the kinetic energy for a single link?
How can you find the inertia tensor in base frame?
What is the procedure for setting up a dynamic model?
What does the standard dynamic model structure look like?
Practice the example for a robot with two joints
How does a transformation matrix between frames look like?
What is the equation for position of frame?
What is the equation for velocity in the frame?


