38824018
Description
Flashcards by Jacob Brændstrup, updated more than 1 year ago
|
|
Created by Jacob Brændstrup
over 2 years ago
|
|
| Question | Answer |
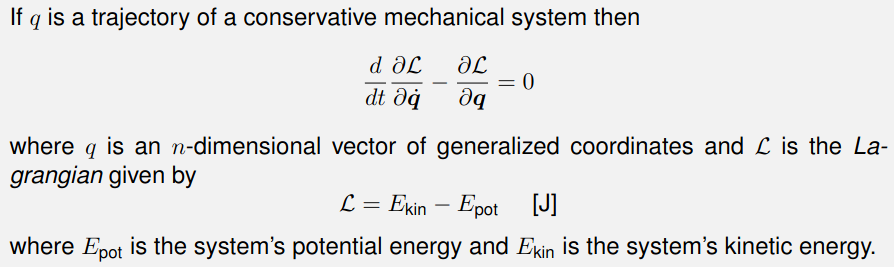
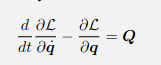
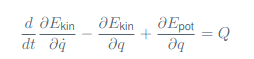
| What is the euler lagrange equation? | |
| What is the euler lagrange method? | The euler lagrange method is a way to setup equations of motion for a system based on the systems kinetic and potential energy |
| What are generalized coordinates? | Generalized coordinated is the minimal independent coordinates that can describe the configuration of the system at any time |
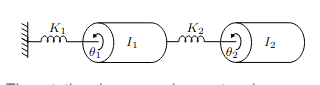
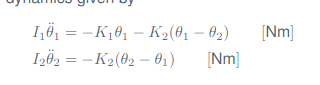
| Can you give an example of the the dynamics for this system? | |
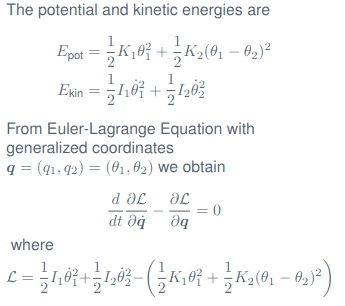
| Can you give an example of the energy equations for this system and the lagrangian? | |
| What does the lagrangian look like if ge the system is not conservative? | Generalized forces is added to the right side. It is called lagrange d'alembarts principle. The lagrangian dosnt change. |
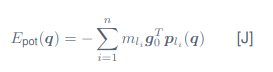
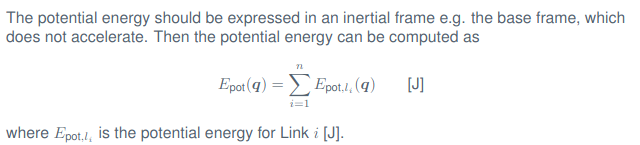
| What is the equation for potential energy for a robot with n links? | |
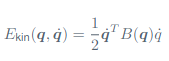
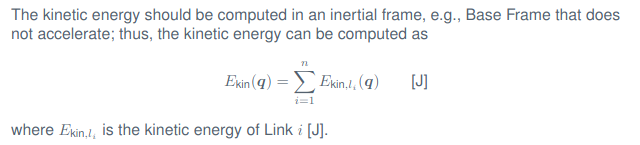
| What is this equation for | A systems kinetic energy |
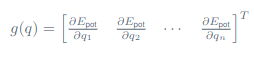
| How can you describe the systems gravity vector from its energys? | |
| How can you write the lagrangian in terms of the systems energys? | |
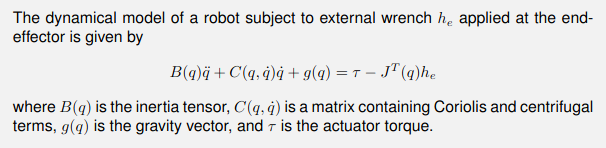
| How can you describe the dynamical model of a robot subject to external wrench at the end effector? | |
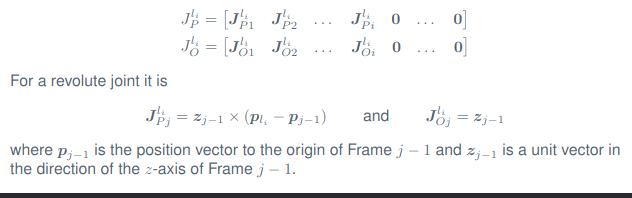
| What does the geometric jacobian desc | |
| How do you derive the geometric jacobian for a revolute joint? | |
| Given the potential energy of each link, how do you find the entire systems potential energy? | They can be added since they are all expressed in the base frame |
| Given the kinetic energy of each link, how can you compute the kinetic energy for the entire system? | They can be added since they are expressed in the same base frame |
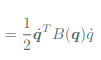
| How do you express the kinetic energy for a single link? | |
| How can you find the inertia tensor in base frame? | |
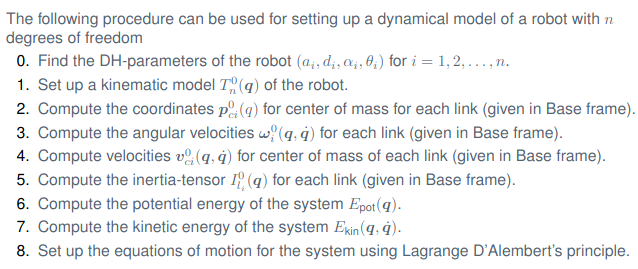
| What is the procedure for setting up a dynamic model? | |
| What does the standard dynamic model structure look like? | |
| Practice the example for a robot with two joints | In lecture 1 |
| How does a transformation matrix between frames look like? | |
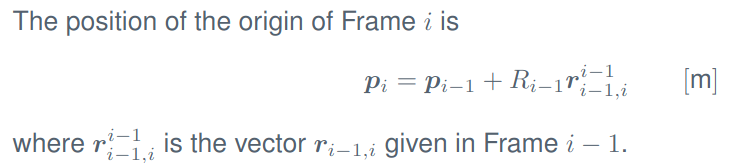
| What is the equation for position of frame? | |
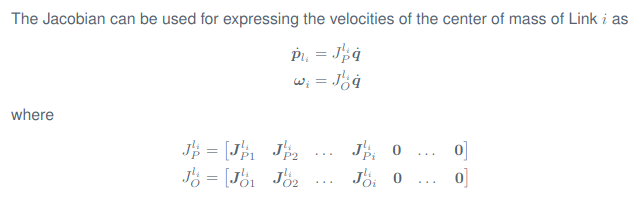
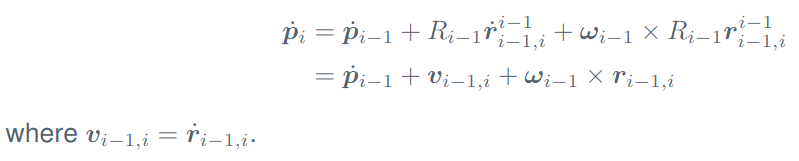
| What is the equation for velocity in the frame? |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Flashcards for free with GoConqr? Learn more.