1296177
Description
Mind Map by Mauricio Minor C, updated more than 1 year ago
|
|
Created by Mauricio Minor C
over 9 years ago
|
|
Grados de Libertad
- Parámetros Independientes
- Eslabones de una cadena cinemática
- Articulaciones
- Fijan al Efector Final
- Agarre
- Herramientas
- Pintura
- Soldadura
- Corte
- Pintura
- Herramientas
- Capacidad de Carga
- Fuerza de Agarre
- Geometría
- PInzas con dos dedos
- PInzas con dos dedos
- Alimentacion
- Neumatica
- Electrica
- Hidráulica
- Neumatica
- Agarre
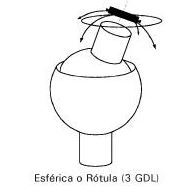
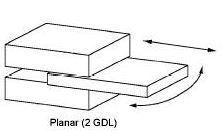
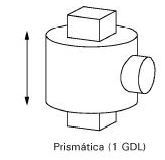
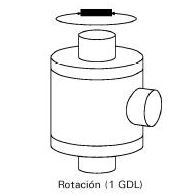
- Pares cinemáticos
- Rotacional
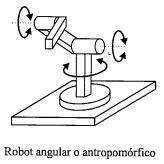
- La combinación de Rotacionales generan Configuración Angular
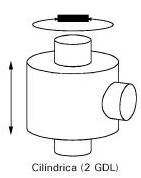
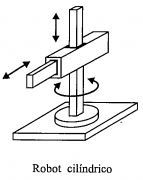
- La combinación de Rotacionales y Prismaticos generan Configuración Cilindrica
- La combinación de Rotacionales y Prismaticos generan Configuración Cilindrica
- La combinación de Rotacionales generan Configuración Angular
- Prismáticos
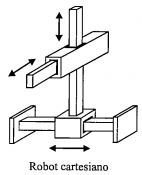
- La combinacion de Prismáticos generan Configuración Cartesiana
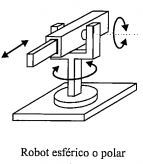
- La combinación de Prismáticos y Rotacionales generan Configuración Polar
- La combinación de Prismáticos y Rotacionales generan Configuración Polar
- La combinacion de Prismáticos generan Configuración Cartesiana
- Cilindricos
- Planar
- Esferica
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.