13316916
Description

Mind Map by Iván Gatica, updated more than 1 year ago
|
|
Created by Iván Gatica
over 7 years ago
|
|
Tema 13. Protocolo de
comunicaciones ModBus y
CAN – Controller Area
Network
- Modbus fue desarrollado por
la empresa Modicon para
utilizarlo en controladores
lógicos programables (PLCs). El
protocolo fue publicado por
primera vez en 1979.
- Estándar
abierto
- Interfaz RS-485,
proporciona una
mayor fiabilidad,
bajo costo, sólo una
fuente de energia
de +5V
- Capacidad de tener múltiples
receptores y transmisores,
rapidez de transmisión y se
conecta a los varios
dispositivos en la misma
línea.
- Capacidad de tener múltiples
receptores y transmisores,
rapidez de transmisión y se
conecta a los varios
dispositivos en la misma
línea.
- El medio físico de conexión puede ser un bus semidúplex (half duplex) (RS-485 o
fibra óptica) o dúplex (full duplex) (RS-422, BC 0-20mA o fibra óptica). La
comunicación es asíncrona y la máxima distancia entre estaciones depende del
nivel físico, pudiendo alcanzar hasta 1200 m sin repetidores.
- La estructura lógica es del tipo
maestro-esclavo, con acceso al
medio controlado por el maestro.
El número máximo de estaciones
previsto es de 63 esclavos más una
estación maestra.
- Ventajas
- No hay necesidad de
tener controladores
especiales
- El software de aplicación es
simple y los principios de
funcionamiento son sencillos
- El alto grado de acceso del
protocolo está asegurado
por todas normas
totalmente libres, las
cuales se pueden descargar
desde su página web
- El alto grado de acceso del
protocolo está asegurado
por todas normas
totalmente libres, las
cuales se pueden descargar
desde su página web
- El software de aplicación es
simple y los principios de
funcionamiento son sencillos
- No hay necesidad de
tener controladores
especiales
- Desventajas
- Esta manera de intercambio de datos
maestro-esclavo) no permite que los
esclavos transmitan datos al momento
que los reciban y que están disponibles
para enviar
- En este tipo de comunicación, el
maestro tiene que hacer un gran
número de requerimientos para
cada uno de los esclavos sobre los
datos que tengan disponibles
- En este tipo de comunicación, el
maestro tiene que hacer un gran
número de requerimientos para
cada uno de los esclavos sobre los
datos que tengan disponibles
- Esta manera de intercambio de datos
maestro-esclavo) no permite que los
esclavos transmitan datos al momento
que los reciban y que están disponibles
para enviar
- Modbus fue desarrollado por
la empresa Modicon para
utilizarlo en controladores
lógicos programables (PLCs). El
protocolo fue publicado por
primera vez en 1979.
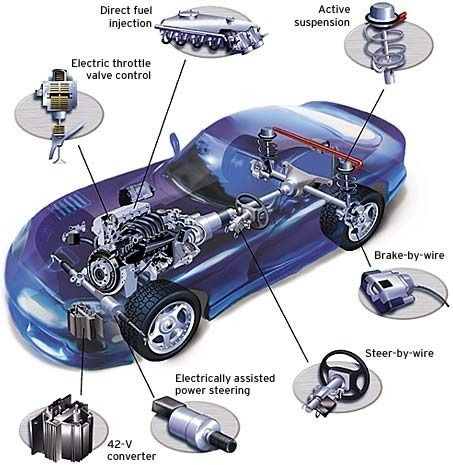
- La historia del protocolo CAN comenzó a
principios de los ochentas, cuando la creación
de tecnología y el funcionamiento de los
vehículos modernos requerían la instalación
de un gran número de sensores
- La compañía BOSCH (Alemania) desarrolló
para este propósito el protocolo CAN (Control
Area Network). El protocolo después se
acreditó con la norma internacional
ISO11898.
- La compañía BOSCH (Alemania) desarrolló
para este propósito el protocolo CAN (Control
Area Network). El protocolo después se
acreditó con la norma internacional
ISO11898.
- Entre más corta es
la longitud del bus,
más rápido llega el
mensaje.
- La capa del bus CAN utilizada para las aplicaciones industriales está nombrada como nodos.
Cada nodo CAN es una unidad de control electrónica, que consiste en un microprocesador con el
programa de aplicación y el software para las capas altas de protocolo, un controlador CAN y un
transceptor CAN de alta velocidad sobre un par de hilos con retorno según ISO-11898-2.
- Desventajas
- Gastos altos de software
- Es probable que durante la
interacción ocurra una interacción
indeseable
- Es probable que durante la
interacción ocurra una interacción
indeseable
- Gastos altos de software
- Ventajas
- Es más fiable
- Tiene un menor
número de conectores
enchufables
- El cableado utilizado
para este estándar es
menos complicado y más
económico
- Es muy fácil de implementar y
cambiar, porque los elementos
adicionales son fáciles de integrar
- Es muy fácil de implementar y
cambiar, porque los elementos
adicionales son fáciles de integrar
- El cableado utilizado
para este estándar es
menos complicado y más
económico
- Tiene un menor
número de conectores
enchufables
- Es más fiable
- Es un bus serial con el acceso
descentralizado en base del modelo
CSMA/CM. Los posibles conflictos
asociados con los accesos simultáneos
al bus se resuelven por la prioridad de
los mensajes a transmitir.
- La historia del protocolo CAN comenzó a
principios de los ochentas, cuando la creación
de tecnología y el funcionamiento de los
vehículos modernos requerían la instalación
de un gran número de sensores
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.