35036366
Description
Mind Map by Ronald Smith Rubio Castillo, updated more than 1 year ago
|
|
Created by Ronald Smith Rubio Castillo
over 2 years ago
|
|
Sistema de
ecuaciones
lineales,
Rectas y
planos.
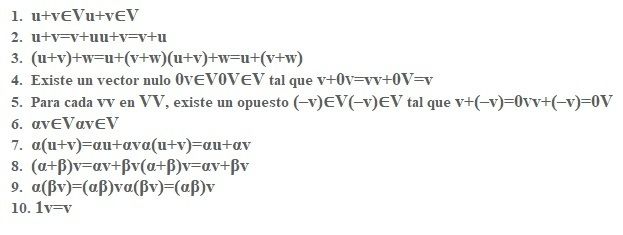
- Definición Espacios vectoriales
- Un espacio vectorial es un conjunto no vacío V de objetos,
llamados vectores, en el que se han definido dos
operaciones: la suma y el producto por un escalar
(número real) sujetas a los diez axiomas que se dan a
continuación.
- Los axiomas deben ser válidos para todos los .vectores u , v y w en V y
todos los escalares α y β reales. Llamamos u + v a la suma de vectores
en V , y α v al producto de un número real α por un vector v ∈ V
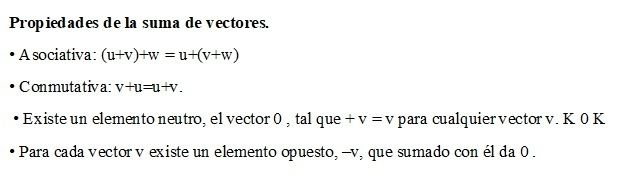
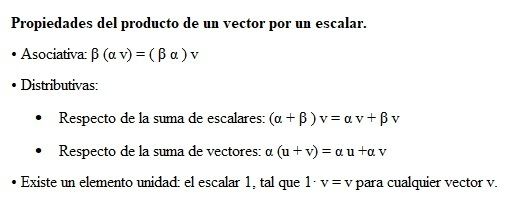
- Propiedades de los espacios vectoriales
- Los axiomas deben ser válidos para todos los .vectores u , v y w en V y
todos los escalares α y β reales. Llamamos u + v a la suma de vectores
en V , y α v al producto de un número real α por un vector v ∈ V
- Un espacio vectorial es un conjunto no vacío V de objetos,
llamados vectores, en el que se han definido dos
operaciones: la suma y el producto por un escalar
(número real) sujetas a los diez axiomas que se dan a
continuación.
- Combinación lineal de vectores y espacio
generado por un conjunto de vectores.
- Una combinación lineal de dos o más vectores es el vector que se obtiene al sumar esos vectores
multiplicados por algunos escalares. Es decir, una combinación lineal es una expresión de la forma:
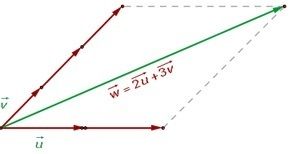
- Para el caso particular de dos vectores u, v , y dos números a,b, entonces
una combinación lineal de u y v está dada por el vector au + bv
- La siguiente figura muestra la representación gráfica del vector
- La siguiente figura muestra la representación gráfica del vector
- Para el caso particular de dos vectores u, v , y dos números a,b, entonces
una combinación lineal de u y v está dada por el vector au + bv
- Espacio Generado El conjunto formado por todas las combinaciones lineales de los vectores v1, v2,. . . ,
vk en R n se llama espacio generado por los vectores v1, v2,. . . , vk .
- Este conjunto se representa por Gen {v1, v2, . . . , vk } .
- Es decir, es el conjunto formado por todas las combinaciones lineales
c1 v1 + c2 v2 + · · · + ck vk
- donde c1,c2,. . . ,ck son escalares libres.
- Si V = Gen {v1, v2, · · · , vk } se dice que los vectores v1, v2,. . . , vk generan a V y que {v1, v2, . . . , vk } es
un conjunto generador de V.
- donde c1,c2,. . . ,ck son escalares libres.
- Es decir, es el conjunto formado por todas las combinaciones lineales
c1 v1 + c2 v2 + · · · + ck vk
- Este conjunto se representa por Gen {v1, v2, . . . , vk } .
- Una combinación lineal de dos o más vectores es el vector que se obtiene al sumar esos vectores
multiplicados por algunos escalares. Es decir, una combinación lineal es una expresión de la forma:
- Independencia lineal de vectores.
- En caso de que un conjunto de vectores no sea linealmente dependiente, se dice que es linealmente
independiente ( o libre ) . Por tanto, escribiendo la negación de la definición de dependencia lineal,
tendremos que un conjunto de vectores es linealmente independiente cuando:
- (a) Ninguno de ellos es combinación lineal de los demás.
- O equivalentemente: (b) El vector 0 no es combinación lineal de ellos, a no ser que la combinación
tenga coeficientes todos nulos. Expresando de otra manera, La única forma de poner como
combinación lineal de los vectores, es con todos los coeficientes nulos. 0
- Ejemplo
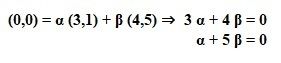
- Veamos que u=(3,1) y v=(4,5) en ℜ2 son linealmente independientes. Para ello intentaremos poner
(0,0) como combinación lineal de ellos, y encontraremos que sólo es posible con coeficientes nulos.
- Este sistema es compatible
determinado, por tanto sólo tiene la
solución α=0, β=0.
- Así pues, la única forma de poner (0,0) como combinación lineal de u, v es con coeficientes α, β nulos.
Esto significa que son linealmente independientes.
- Así pues, la única forma de poner (0,0) como combinación lineal de u, v es con coeficientes α, β nulos.
Esto significa que son linealmente independientes.
- Este sistema es compatible
determinado, por tanto sólo tiene la
solución α=0, β=0.
- Veamos que u=(3,1) y v=(4,5) en ℜ2 son linealmente independientes. Para ello intentaremos poner
(0,0) como combinación lineal de ellos, y encontraremos que sólo es posible con coeficientes nulos.
- Ejemplo
- O equivalentemente: (b) El vector 0 no es combinación lineal de ellos, a no ser que la combinación
tenga coeficientes todos nulos. Expresando de otra manera, La única forma de poner como
combinación lineal de los vectores, es con todos los coeficientes nulos. 0
- (a) Ninguno de ellos es combinación lineal de los demás.
- En caso de que un conjunto de vectores no sea linealmente dependiente, se dice que es linealmente
independiente ( o libre ) . Por tanto, escribiendo la negación de la definición de dependencia lineal,
tendremos que un conjunto de vectores es linealmente independiente cuando:
- Base y dimensión de un espacio vectorial.
- Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o
subespacio, que sea a la vez linealmente independiente
- Propiedades de las bases. 1. Una base de S es un sistema generador minimal de S (lo más pequeño
posible). 2. Además es un conjunto independiente maximal dentro de S (lo más grande posible). 3. Una
base de S permite expresar todos los vectores de S como combinación lineal de ella, de manera única
para cada vector.
- Ejemplos de bases.
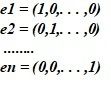
- 1. La base canónica (o base natural, o base estándar) de ℜ n:
- - Son linealmente independientes porque forman un determinante no nulo.
- Son sistema generador de ℜ n porque todo vector (a1,a2,. . . ,an)∈ ℜ n se
puede expresar como combinación lineal de ellos: (a1,a2,. . . ,an)= a1(1,0,. . .
,0)+ a2(0,1,. . . ,0)+ . . . + an(0,0,. . . ,1)
- - Son linealmente independientes porque forman un determinante no nulo.
- Son sistema generador de ℜ n porque todo vector (a1,a2,. . . ,an)∈ ℜ n se
puede expresar como combinación lineal de ellos: (a1,a2,. . . ,an)= a1(1,0,. . .
,0)+ a2(0,1,. . . ,0)+ . . . + an(0,0,. . . ,1)
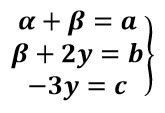
- Otra base de ℜ 3 distinta de la canónica: (1,0,0), (1,1,0), (0,2,-3).
- - Son linealmente independientes porque forman un determinante no nulo. - Son sistema generador
de ℜ 3 porque cualquier vector (a,b,c) se puede poner como combinación lineal de ellos. En efecto,
dado (a,b,c), buscamos α , , β γ que satisfagan
- (a,b,c)= α (1,0,0)+ β (1,1,0)+γ (0,2,-3) Se
obtiene un sistema:
- en las incógnitas α , , β γ , que es compatible determinado para cualesquiera a,b,c.
- en las incógnitas α , , β γ , que es compatible determinado para cualesquiera a,b,c.
- (a,b,c)= α (1,0,0)+ β (1,1,0)+γ (0,2,-3) Se
obtiene un sistema:
- - Son linealmente independientes porque forman un determinante no nulo. - Son sistema generador
de ℜ 3 porque cualquier vector (a,b,c) se puede poner como combinación lineal de ellos. En efecto,
dado (a,b,c), buscamos α , , β γ que satisfagan
- (1,2,3), (4,5,6), (7,8,9) en ℜ 3 no forman base porque no son linealmente independientes (su
determinante es nulo).
- 1. La base canónica (o base natural, o base estándar) de ℜ n:
- Ejemplos de bases.
- Propiedades de las bases. 1. Una base de S es un sistema generador minimal de S (lo más pequeño
posible). 2. Además es un conjunto independiente maximal dentro de S (lo más grande posible). 3. Una
base de S permite expresar todos los vectores de S como combinación lineal de ella, de manera única
para cada vector.
- Dimesion: Todas las bases de un mismo espacio o subespacio tienen el mismo número de vectores. Se
llama dimensión de dicho espacio o subespacio.
- Por tanto, la dimensión es el máximo número de vectores independientes que podemos tener en el
espacio o subespacio. En otras palabras, es el máximo rango que puede tener un Es también el rango
de cualquier sistema generador de dicho espacio. conjunto de vectoresde dicho espacio.
- Ejemplo de dimensión
- 1. ℜn tiene dimensión n, pues tiene una base de n elementos (p.ej. la canónica).
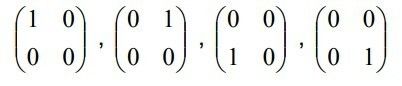
- M2x2= {matrices 2x2 con términos reales} tiene dimensión 4. Una base de M2x2 es:
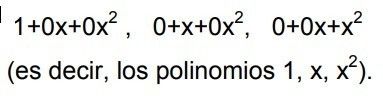
- P2= {polinomios de grado≤ 2 con coeficientes reales} tiene dimensión 3. Una base de P2 es, por
ejemplo, la formada por los tres polinomios siguientes:
- 1. ℜn tiene dimensión n, pues tiene una base de n elementos (p.ej. la canónica).
- Ejemplo de dimensión
- Por tanto, la dimensión es el máximo número de vectores independientes que podemos tener en el
espacio o subespacio. En otras palabras, es el máximo rango que puede tener un Es también el rango
de cualquier sistema generador de dicho espacio. conjunto de vectoresde dicho espacio.
- Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o
subespacio, que sea a la vez linealmente independiente
- Rango, nulidad, espacio renglón y
espacio columna
- Espacio nulo y nulidad de una matriz
- NA se denomina el espacio nulo de A y n(A) 5 dim NA se denomina nulidad de A. Si NA contiene sólo al
vector cero, entonces n(A) 5 0.
- NULIDAD DE UNA MATRIZ Definición.-La nulidad denotada como: v(A)= dimNAa es la dimensión del
espacio nulo.
- NULIDAD DE UNA MATRIZ Definición.-La nulidad denotada como: v(A)= dimNAa es la dimensión del
espacio nulo.
- NA se denomina el espacio nulo de A y n(A) 5 dim NA se denomina nulidad de A. Si NA contiene sólo al
vector cero, entonces n(A) 5 0.
- RANGO DE UNA MATRIZ
- Sea A una matriz de m* n . Entonces el rango de A,
denotado:
- p(A)= dim Im(A) es la dimensión de la imagen.
- p(A)= dim Im(A) es la dimensión de la imagen.
- Sea A una matriz de m* n . Entonces el rango de A,
denotado:
- IMAGEN O RECORRIDO DE UNA MATRIZ
- La imagen o recorrido de una matriz A esta formado por los vectores que satisfacen al sistema
homogéneo.
- La imagen o recorrido de una matriz A esta formado por los vectores que satisfacen al sistema
homogéneo.
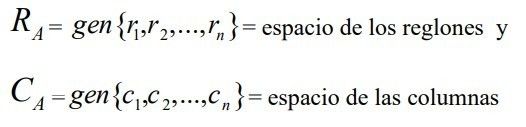
- ESPACIO DE LOS REGLONES Y ESPACIO DE LAS COLUMNAS DE UNA MATRIZ
- Si A es una matriz de m * n , sean { r1 ,r2 ,...,rn } los renglones de A y { c1 ,c2 ,...,cn} las
columnas de A. Entonces se Define:
- Si A es una matriz de m * n , sean { r1 ,r2 ,...,rn } los renglones de A y { c1 ,c2 ,...,cn} las
columnas de A. Entonces se Define:
- Espacio nulo y nulidad de una matriz
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.