38177834
Description
Mind Map by Alexander Tello, updated more than 1 year ago
|
|
Created by Alexander Tello
about 3 years ago
|
|
CONTROL PID
- El controlador PID (Proporcional - Integral -
Derivativo) es el controlador más popular a nivel
industrial debido a su robustez y facilidad de
entendimiento
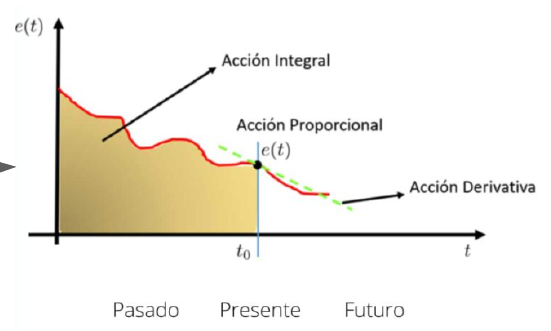
- Acción Proporcional
- Produce una señal de control
proporcional a la señal de
error.
- Produce una señal de control
proporcional a la señal de
error.
- Acción Integral
- roporciona una corrección para
compensar las perturbaciones y
mantener la variable controlada en
el punto de consigna
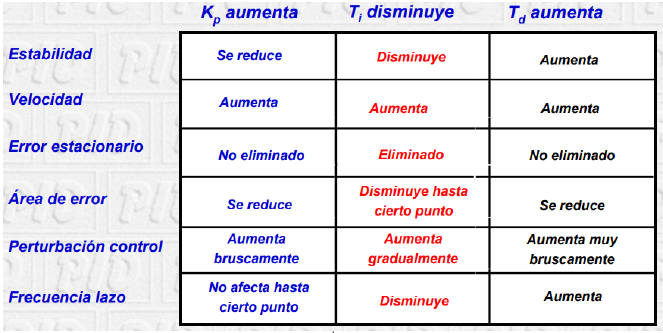
- Reglas heurísticas de ajuste
- Reglas heurísticas de ajuste
- roporciona una corrección para
compensar las perturbaciones y
mantener la variable controlada en
el punto de consigna
- Acción Derivativa
- Anticipa el efecto de la acción
proporcional para estabilizar más
rápidamente la variable controlada
después de cualquier perturbación
- Anticipa el efecto de la acción
proporcional para estabilizar más
rápidamente la variable controlada
después de cualquier perturbación
- Acción Proporcional
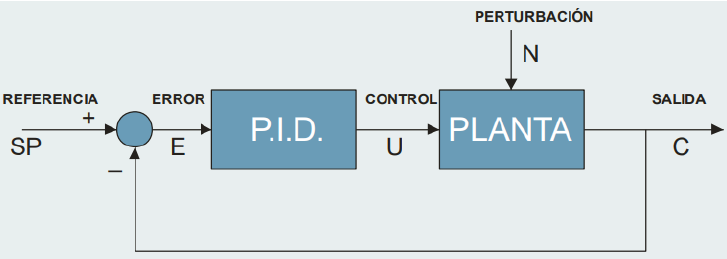
- Cómo funciona
- Esquema básico
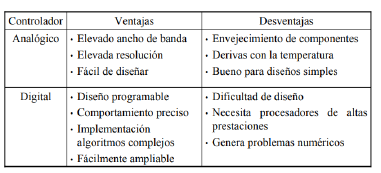
- PID Continuo/ Analógico
- Implementados con amplificadores,
resistencias, condensadores que realizan
estructuras semejantes a filtros que modifican
la respuesta frecuencial del sistema.
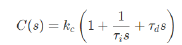
- Representación en:
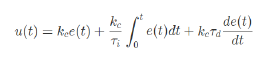
- Dominio del tiempo continuo
- Dominio de la frecuencia continua
- Dominio del tiempo continuo
- Representación en:
- Implementados con amplificadores,
resistencias, condensadores que realizan
estructuras semejantes a filtros que modifican
la respuesta frecuencial del sistema.
- PID Digital
- Se obtienen a través de la discretización de un
controlador PID continuo. Implementados con
microprocesadores, microcontroladores,FPGA,
etc. Necesitan de conversores ADC y DAC
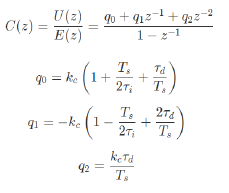
- Representación en:
- Dominio del tiempo discreto
- Dominio de la frecuencia discreta
- Dominio del tiempo discreto
- Representación en:
- Se obtienen a través de la discretización de un
controlador PID continuo. Implementados con
microprocesadores, microcontroladores,FPGA,
etc. Necesitan de conversores ADC y DAC
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.