32956148
Description
Mind Map by ANGELA CHAPARRO, updated more than 1 year ago
|
|
Created by ANGELA CHAPARRO
over 2 years ago
|
|
ESTÁTICA UNIDAD 1
- ANÁLISIS DE ESTRUCTURA
- Clasificación de estructuras
- Mediante los diagramas de cuerpo libre se pueden observar todas las fuerzas que actuan sobre
una estructura (acciones) y las que la mantienen en equilibro (reacciones); de estas, algunas
serán cargas conocidas y otras serán las incógnitas
- Mediante los diagramas de cuerpo libre se pueden observar todas las fuerzas que actuan sobre
una estructura (acciones) y las que la mantienen en equilibro (reacciones); de estas, algunas
serán cargas conocidas y otras serán las incógnitas
- Elementos mecánicos
- Para que una estructura se encuentre en equilibrio, cada uno los elementos que la componen también
debe estarlo un elemento se encuentra en equilibrio, cuando se secciona o se divide cada una de sus
partes, también debe encontrarse en equilibrio
- Para que una estructura se encuentre en equilibrio, cada uno los elementos que la componen también
debe estarlo un elemento se encuentra en equilibrio, cuando se secciona o se divide cada una de sus
partes, también debe encontrarse en equilibrio
- Vigas: reacciones, diagramas
de cortante y momento Las
vigas
- También llamadas trabes, son elementos estructurales cuya función es soportar una gran
diversidad de cargas, con diferentes condiciones de apoyo.
- También llamadas trabes, son elementos estructurales cuya función es soportar una gran
diversidad de cargas, con diferentes condiciones de apoyo.
- Viga Gerber
- La viga Gerber es un elemento estructural que puede ser isostático o hiperestático, que disminuye su
rigidez mediante el uso de articulaciones colocadas de tal torma que su estabilidad interna y externa
no sean afectadas
- La viga Gerber es un elemento estructural que puede ser isostático o hiperestático, que disminuye su
rigidez mediante el uso de articulaciones colocadas de tal torma que su estabilidad interna y externa
no sean afectadas
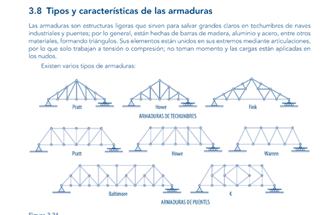
- Tipos y características de las
armaduras
- Las armaduras son estructuras ligeras que sirven para salvar grandes claros en techumbres de naves
industriales y puentes; por lo general, están hechas de barras de madera, aluminio y acero, entre otros
materiales, formando triángulos Sus elementos están unidos en sus extremos mediante
articulaciones, por lo que solo trabajan a tensión o compresión; no toman momento y las cargas están
aplicadas en los nudos
- Las armaduras son estructuras ligeras que sirven para salvar grandes claros en techumbres de naves
industriales y puentes; por lo general, están hechas de barras de madera, aluminio y acero, entre otros
materiales, formando triángulos Sus elementos están unidos en sus extremos mediante
articulaciones, por lo que solo trabajan a tensión o compresión; no toman momento y las cargas están
aplicadas en los nudos
- Marcos simples
- Los marcos simples son elementos estructurales formados por trabes (elementos dispuestos
en forma horizontal) y columnas (elementos dispuestos de forma vertical); el eje longitudinal
de este tipo de estructuras es una línea continua
- Los marcos simples son elementos estructurales formados por trabes (elementos dispuestos
en forma horizontal) y columnas (elementos dispuestos de forma vertical); el eje longitudinal
de este tipo de estructuras es una línea continua
- Cables con carga concentrada
- Los cables son estructuras construidas de acero, fibras vegetales o fibras sintéticas, que en general
se presentan o utilizan en puentes colgantes, teléfericos, líneas ole transmisión ole alta tensión,
contravientos y tensores, entre otras aplicaciones
- Los cables son estructuras construidas de acero, fibras vegetales o fibras sintéticas, que en general
se presentan o utilizan en puentes colgantes, teléfericos, líneas ole transmisión ole alta tensión,
contravientos y tensores, entre otras aplicaciones
- Clasificación de estructuras
- ESTÁTICA DE CUERPOS RIGIDOS
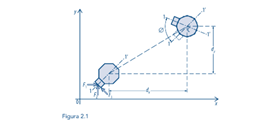
- Las fuerzas aplicadas sobre los cuerpos rígidos ocasionan que estos se
desplacen y giren alrededor de un punto o de un eje, En la figura 2,1 se
muestra la forma como las fuerzas F“ F2 y F3 ocasionan los des-
plazamientos dx, dy, así como un giro 4) alrededor del eje z,
- Principio de transmisibilidad
- Las condiciones de equilibrio o de movimiento de un cuerpo rígido no se modificarán si al aplicar una fuerza F en un
determinado punto, con una magnitud, dirección y sentido, es reemplazada por otra fuerza P de igual magnitud, dirección y
sentido, pero aplicada en cualquier otro punto, que pertenezca a la misma línea de acción de la primera fuerza, A las fuerzas Fy
P se les llaman equivalentes, pues causan el mismo efecto sobre el cuerpo rígido, sobre el cual actúan.
- Las condiciones de equilibrio o de movimiento de un cuerpo rígido no se modificarán si al aplicar una fuerza F en un
determinado punto, con una magnitud, dirección y sentido, es reemplazada por otra fuerza P de igual magnitud, dirección y
sentido, pero aplicada en cualquier otro punto, que pertenezca a la misma línea de acción de la primera fuerza, A las fuerzas Fy
P se les llaman equivalentes, pues causan el mismo efecto sobre el cuerpo rígido, sobre el cual actúan.
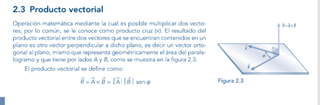
- Producto vectorial
- Operación matemática mediante la cual es posible multiplicar dos vectores; por lo común, se le conoce como producto cruz (X),
El resultado del producto vectorial entre dos vectores que se encuentran contenidos en un plano es otro vector perpendicular a
dicho plano, es decir un vector orto- gonal al plano, mismo que representa geométricamente el área del paralelogramo y que
tiene por lados A y B
- Operación matemática mediante la cual es posible multiplicar dos vectores; por lo común, se le conoce como producto cruz (X),
El resultado del producto vectorial entre dos vectores que se encuentran contenidos en un plano es otro vector perpendicular a
dicho plano, es decir un vector orto- gonal al plano, mismo que representa geométricamente el área del paralelogramo y que
tiene por lados A y B
- Producto escalar
- Operación matemática por medio dela cual es posible multiplicar dos vectores Por lo general, a esta se le conoce como
producto punto (JA El resultado del producto escalar entre dos vectores que se encuentran contenidos en un plano es un
escalar, es decir una magnitud Geometrí- camente, el producto escalar permite encontrar la dirección entre vec- tores en
el espacio
- Operación matemática por medio dela cual es posible multiplicar dos vectores Por lo general, a esta se le conoce como
producto punto (JA El resultado del producto escalar entre dos vectores que se encuentran contenidos en un plano es un
escalar, es decir una magnitud Geometrí- camente, el producto escalar permite encontrar la dirección entre vec- tores en
el espacio
- Momento de una fuerza con
respecto a un punto
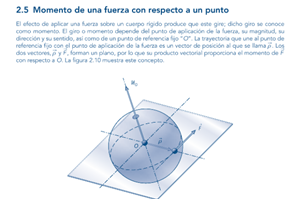
- El efecto de aplicar una fuerza sobre un cuerpo rígido produce que este gire; dicho giro se conoce como momento El giro o
momento depende del punto de aplicación de la tuerza, su magnitud, su dirección y su sentido, así como de un punto de
referencia fijo "O” La trayectoria que une al punto de referencia fijo con el punto de aplicación de la tuerza es un vector de
posición al que se llama {p y f , forman un plano, por lo que su producto vectorial proporciona el momento de F con
respecto a O
- El efecto de aplicar una fuerza sobre un cuerpo rígido produce que este gire; dicho giro se conoce como momento El giro o
momento depende del punto de aplicación de la tuerza, su magnitud, su dirección y su sentido, así como de un punto de
referencia fijo "O” La trayectoria que une al punto de referencia fijo con el punto de aplicación de la tuerza es un vector de
posición al que se llama {p y f , forman un plano, por lo que su producto vectorial proporciona el momento de F con
respecto a O
- Momento de un par
- Si se tienen dos fuerzas F de igual magnitud y dirección, pero de sentidos opues- tos, aplicadas a una distancia d de un punto O,
se dice que torman un par o un giro.
- Si se tienen dos fuerzas F de igual magnitud y dirección, pero de sentidos opues- tos, aplicadas a una distancia d de un punto O,
se dice que torman un par o un giro.
- Sistema equivalente de fuerzas
- Dos sistemas de fuerza que actúan sobre el mismo cuerpo rígido son equivalentes si producen el mismo efecto sobre el
mismo punto.
- Dos sistemas de fuerza que actúan sobre el mismo cuerpo rígido son equivalentes si producen el mismo efecto sobre el
mismo punto.
- Equilibrio de un cuerpo rígido en el espacio
- Equilibrio de un cuerpo rígido en el plano
- Principio de transmisibilidad
- Las fuerzas aplicadas sobre los cuerpos rígidos ocasionan que estos se
desplacen y giren alrededor de un punto o de un eje, En la figura 2,1 se
muestra la forma como las fuerzas F“ F2 y F3 ocasionan los des-
plazamientos dx, dy, así como un giro 4) alrededor del eje z,
- ESTÁTICA DE PARTICULAS
- ¿Qué es Ia Estática?
- mecanica
- Mecánica de los cuerpos rígidos;
- 2) Mecánica de los cuerpos deíormables;
- 3) Mecánica de fiuidos
- Mecánica de los cuerpos rígidos;
- mecanica
- Conceptos fundamentales
- Espacio
- Tiempo
- Masa
- Fuerza
- Espacio
- Leyes de Newton
- 1a Ley. Una partícula permanecerá en reposo
o se moverá a velocidad constante si Ia
resultante de las fuerzas que actúan sobre
eIIa es cero,
- 2a Ley. Si Ia resultante de las fuerzas que actúan sobre una
partícula es diferente de cero, la partícula tendrá una
aceleración proporcional a Ia magnitud de la resultante y en el
sentido de esta, Se representa mediante Ia expresión: a F:m><a
- 3a Ley. A toda acción corresponde una reacción de igual
magnitud, pero de sentido contrario,
- 1a Ley. Una partícula permanecerá en reposo
o se moverá a velocidad constante si Ia
resultante de las fuerzas que actúan sobre
eIIa es cero,
- Sistemas de unidades
- Existen unidades para medir Ia longitud, Ia masa, el tiempo y
Ia fuerza, para eso se utiliza el Sistema Internacional de
Unidades (SI) o el Sistema Ingles de Unidades
- Existen unidades para medir Ia longitud, Ia masa, el tiempo y
Ia fuerza, para eso se utiliza el Sistema Internacional de
Unidades (SI) o el Sistema Ingles de Unidades
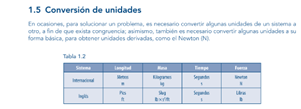
- Conversión de unidades
- En ocasiones, para solucionar un problema, es necesario
convertir algunas unidades de un sistema a otro, a tin
de que exista congruencia; asimismo, también es
necesario convertir algunas unidades a su forma básica,
para obtener unidades derivadas, como el Newton (N)
- En ocasiones, para solucionar un problema, es necesario
convertir algunas unidades de un sistema a otro, a tin
de que exista congruencia; asimismo, también es
necesario convertir algunas unidades a su forma básica,
para obtener unidades derivadas, como el Newton (N)
- Vector
- Un vector es una representación gráfica que describe una
cantidad física, como el peso de un objeto, la tensión en un
cable, el empuje sobre un cuerpo, el desplazamiento, la
velocidad, la aceleración, la posición, la fuerza y el momento
- Un vector es una representación gráfica que describe una
cantidad física, como el peso de un objeto, la tensión en un
cable, el empuje sobre un cuerpo, el desplazamiento, la
velocidad, la aceleración, la posición, la fuerza y el momento
- Suma de vectores
- Gráfica (mediante el método del paralelogramo, por la
regla del triángulo y el método del polígono)
- Analítica (mediante las componentes rectangulares)
- Gráfica (mediante el método del paralelogramo, por la
regla del triángulo y el método del polígono)
- Componentes rectangulares de
un vector en el plano
- Las componentes rectangulares se llaman así porque son perpendiculares entre si y
forman un ángulo recto Si se utiliza un marco de referencia, como el plano cartesiano xy,
las componentes rectangulares se pueden representar por medio el uso de la
trigonometria como la proyección del vector sobre los ejes xy y (véase figura 1,6)
- Las componentes rectangulares se llaman así porque son perpendiculares entre si y
forman un ángulo recto Si se utiliza un marco de referencia, como el plano cartesiano xy,
las componentes rectangulares se pueden representar por medio el uso de la
trigonometria como la proyección del vector sobre los ejes xy y (véase figura 1,6)
- Equilibrio dela partícula .
- Se dice que una partícula se encuentra en equilibrio si Ia resultante de las fuerzas que actúan
sobre esta es cero; es decir, se contrarrestan, F” como se muestra en Ia figura 1‘24 Las
ecuaciones que definen el equilibrio dela partícula son: .
- Se dice que una partícula se encuentra en equilibrio si Ia resultante de las fuerzas que actúan
sobre esta es cero; es decir, se contrarrestan, F” como se muestra en Ia figura 1‘24 Las
ecuaciones que definen el equilibrio dela partícula son: .
- ¿Qué es Ia Estática?
- CENTROIDES Y MOMENTOS DE INERCIA
- Centros de gravedad
- se idealiza como un vector que apunta hacia el
centro dela Tierra, debido a la Fuerza de gravedad
Dicho vector tiene su punto de aplicación en el
centroide del cuerpo rígido
- se idealiza como un vector que apunta hacia el
centro dela Tierra, debido a la Fuerza de gravedad
Dicho vector tiene su punto de aplicación en el
centroide del cuerpo rígido
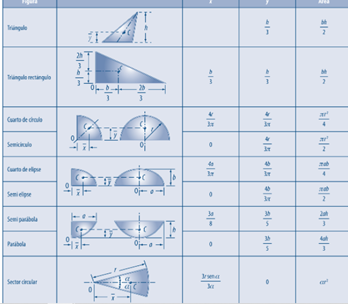
- Centroides de áreas
- Cuando se tienen áreas simétricas, como el
cuadrado, el rectángulo yel círculo, es muytácil
determinar su centroide, solo basta con encontrar
la intersección entre sus ejes de simetría o dividir
el área por la mitad en sentido vertical y
horizontal
- Cuando se tienen áreas simétricas, como el
cuadrado, el rectángulo yel círculo, es muytácil
determinar su centroide, solo basta con encontrar
la intersección entre sus ejes de simetría o dividir
el área por la mitad en sentido vertical y
horizontal
- Momento de inercia
de un área
- EI momento de inercia es otra delas
propiedades geométricas delas áreas y los
volumenes
- EI momento de inercia es otra delas
propiedades geométricas delas áreas y los
volumenes
- Momento polar de
inercia.
- El momento polar de inercia se utiliza normalmente
en problemas relacionados con torsión de ejes de
sección transversal circular y rotación de cuerpos
rígidos
- El momento polar de inercia se utiliza normalmente
en problemas relacionados con torsión de ejes de
sección transversal circular y rotación de cuerpos
rígidos
- Radio de giro de un área
- EI radio de giro de un área se define como Ia
distancia normal del eje a| centroide; Ia cual, a|
elevarla a| cuadrado y multiplicarla por el área, da el
mismo valor que el momento de inercia del área
alrededor de ese mismo eje
- EI radio de giro de un área se define como Ia
distancia normal del eje a| centroide; Ia cual, a|
elevarla a| cuadrado y multiplicarla por el área, da el
mismo valor que el momento de inercia del área
alrededor de ese mismo eje
- Teorema de Steiner o
de ejes paralelos
- Consiste en transportar eI momento de inercia de un
área con respecto a un eje que pasa por su cen- troide
hacia un eje paralelo arbitrario.
- Consiste en transportar eI momento de inercia de un
área con respecto a un eje que pasa por su cen- troide
hacia un eje paralelo arbitrario.
- Producto de inercia
- Se obtiene al integrar el producto de cada diferencial
de área por las distancias normales X y y del centroide
del área a los ejes coordenados centroidales
- Se obtiene al integrar el producto de cada diferencial
de área por las distancias normales X y y del centroide
del área a los ejes coordenados centroidales
- Módulo de sección
- El módulo de sección es otra de las propiedades geométricas de las áreas
planas Se define como el cociente entre el momento de inercia y la
distancia del centroide a la fibra más alejada en el eje X o en el eje y
- El módulo de sección es otra de las propiedades geométricas de las áreas
planas Se define como el cociente entre el momento de inercia y la
distancia del centroide a la fibra más alejada en el eje X o en el eje y
- Leyes de la fricción
- I Para dos superficies que exhiben movimiento relativo, la
fuerza de fricción dinámica es directamente proporcional a
la reacción normal y casi independiente de la velocidad
relativa entre las superficies
- I La fuerza de fricción entre dos superficies se opone a su
movimiento relativo o intento de movimiento
- I Las fuerzas de fricción son independientes del área
de contacto entre las superficies
- I Para dos superficies que no exhiben un movimiento relativo, la
fuerza de fricción estática es directamente proporcional a la
fuerza normal
- I Para dos superficies que exhiben movimiento relativo, la
fuerza de fricción dinámica es directamente proporcional a
la reacción normal y casi independiente de la velocidad
relativa entre las superficies
- Coeficientes de
fricción
- Los coeficientes de fricción dependen de la rugosidad o aspereza de
la superficie de contacto
- Los coeficientes de fricción dependen de la rugosidad o aspereza de
la superficie de contacto
- Ángulos de fricción .
- La dirección se representa como el ángulo que forma la resultante con una línea de
referencia; si se aplica este concepto al caso de la tricción, se tiene que el ángulo
formado entre la normal, I\l, y la fuerza de fricción, Fm, es el ángulo de fricción estática.
- La dirección se representa como el ángulo que forma la resultante con una línea de
referencia; si se aplica este concepto al caso de la tricción, se tiene que el ángulo
formado entre la normal, I\l, y la fuerza de fricción, Fm, es el ángulo de fricción estática.
- Centros de gravedad
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.