4366489
Description
Mind Map by wilson sanipatin, updated more than 1 year ago
|
|
Created by wilson sanipatin
about 8 years ago
|
|
Requerimientos de un sistema de
programacion de robots
- Requerimientos Generales
- Entorno de
Programación
- Es de gran importancia para conseguir un aumento de productividad, contar con un entorno de
programación adecuado a las necesidades
- Programar las acciones de un manipulador que en todo momento existe una interacción
con el entorno, tratándose de un proceso continuo de prueba y error
- Los sistemas de programación de robots sean de tipo interpretado, pudiéndose realizar un
seguimiento paso a paso de lo programado en cada momento.
- Algunos de los sistemas de programación actuales se soportan sobre sistemas operativos
multitarea, permitiendo el control simultáneo y sincronizado de varios robots o del robot con
otros sistemas.
- Algunos de los sistemas de programación actuales se soportan sobre sistemas operativos
multitarea, permitiendo el control simultáneo y sincronizado de varios robots o del robot con
otros sistemas.
- Los sistemas de programación de robots sean de tipo interpretado, pudiéndose realizar un
seguimiento paso a paso de lo programado en cada momento.
- Programar las acciones de un manipulador que en todo momento existe una interacción
con el entorno, tratándose de un proceso continuo de prueba y error
- Es de gran importancia para conseguir un aumento de productividad, contar con un entorno de
programación adecuado a las necesidades
- Modelado del
Entorno
- Es la representación que tiene el robot de los objetos con los que interacciona. Normalmente
este modelo se limita a características geométricas: posición y orientación de los objetos, y en
ocasiones a su forma, dimensiones, peso.
- Las posición y orientación de los objetos del modelo, lo más frecuente es asignar a
cada objeto un sistema de referencia, de manera que la posición y orientación de este sistema
referidos a un sistema base, normalmente denominado sistema del mundo, definen de manera
única las del objeto.
- Es la representación que tiene el robot de los objetos con los que interacciona. Normalmente
este modelo se limita a características geométricas: posición y orientación de los objetos, y en
ocasiones a su forma, dimensiones, peso.
- Tipo de Datos
- Un sistema de programación de robots cuenta con datos convencionales (enteros, reales, etc) y
con otros destinados a definir las operaciones de interacción con el entorno.
- Utilizando coordenadas articulares o del robot: se usa una n-upla (q1………..qn), donde n es el
número de grados de libertad del robot, que indica los valores articulares que debe tomar el
robot para posicionar y orientar.
- Un sistema de referencia de coordenadas {S1}al objeto, su posición se describe por las
coordenadas cartesianas del origen de {S1}(px,py,pz) mientras que la orientación admite
diferentes tipos de representación.
- Un sistema de referencia de coordenadas {S1}al objeto, su posición se describe por las
coordenadas cartesianas del origen de {S1}(px,py,pz) mientras que la orientación admite
diferentes tipos de representación.
- Utilizando coordenadas articulares o del robot: se usa una n-upla (q1………..qn), donde n es el
número de grados de libertad del robot, que indica los valores articulares que debe tomar el
robot para posicionar y orientar.
- Un sistema de programación de robots cuenta con datos convencionales (enteros, reales, etc) y
con otros destinados a definir las operaciones de interacción con el entorno.
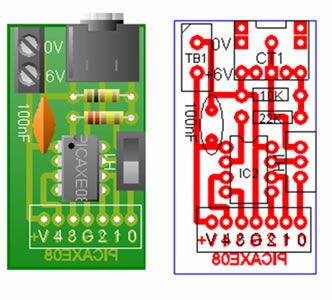
- Manejo de Entradas/Salidas
- salidas binarias el robot posee instrucciones de activación o desactivación de las mismas. En cuanto
a las entradas, el robot tiene la capacidad de leerlas y controlar el flujo del programa en función de
su valor, como esperas o saltos condicionados.
- robot con su entorno lo constituye el empleo de comunicaciones mediante red local o conexión
punto a punto. Esta comunicación permite integrar al robot en un sistema informático general
controlando o supervisando su funcionamiento desde un computador externo.
- La información proporcionada por los sensores puede utilizarse en la programación de robots de
distintas maneras, como por ejemplo modificar la trayectoria, elegir entre varias alternativas,
obtener la identidad y posición de objetos y sus características y cumplir con restricciones externas.
- salidas binarias el robot posee instrucciones de activación o desactivación de las mismas. En cuanto
a las entradas, el robot tiene la capacidad de leerlas y controlar el flujo del programa en función de
su valor, como esperas o saltos condicionados.
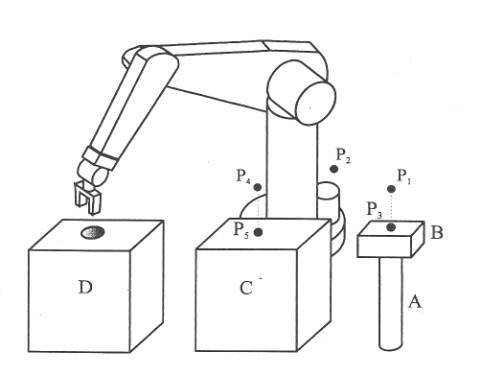
- Control del Movimiento del Robot
- Las trayectorias de un robot pueden ser punto a punto, coordinadas o trayectoria continua, este
último caso incluye la línea recta, interpolación circular y otras.
- En relación a la especificación de la velocidad, ésta suele ser indicada en la propia instrucción de
movimiento como tanto por ciento de una velocidad
- sistemas de programación disponen de los denominados puntos de paso o vía points, para resolver
este tipo de situaciones.
- Las trayectorias de un robot pueden ser punto a punto, coordinadas o trayectoria continua, este
último caso incluye la línea recta, interpolación circular y otras.
- Control del flujo de ejecución del programa
- enguaje de programación de propósito general, un lenguaje de programación de robots permite al
programador especificar de alguna manera un flujo de ejecución de operaciones
- Se emplean para ello las estructuras habituales de bucles (for, repeat, while, etc). También es
importante la capacidad de procesamiento en paralelo
- Las órdenes de un solo programa, como para el control de un único robot en una celda de trabajo
cuyos equipos se encuentran igualmente bajo el control del programa del robot.
- Las órdenes de un solo programa, como para el control de un único robot en una celda de trabajo
cuyos equipos se encuentran igualmente bajo el control del programa del robot.
- Se emplean para ello las estructuras habituales de bucles (for, repeat, while, etc). También es
importante la capacidad de procesamiento en paralelo
- enguaje de programación de propósito general, un lenguaje de programación de robots permite al
programador especificar de alguna manera un flujo de ejecución de operaciones
- Entorno de
Programación
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.