674634
Description
Mind Map by james_hobson, updated more than 1 year ago
|
|
Created by james_hobson
almost 12 years ago
|
|
Mechanics
- Vectors & Scalars
- Vectors
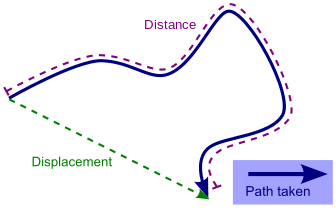
- Displacement
- Velocity
- The rate of change of displacement
- If a body is moving in a circular path with a constant speed, the velocity
is NOT constant as the direction is changing
- Magnitude of velocity = magnitude of displacement / time
- The rate of change of displacement
- Acceleration
- Rate of change of velocity
- Rate of change of velocity
- Vectors have both magnitude and direction.
- The length of the line represents the magnitude
- The length of the line represents the magnitude
- Two vectors are only equal if they have the same magnitude and
direction
- Momentum
- Mass x Velocity
- Mass x Velocity
- Displacement
- Scalars
- Distance
- Speed
- Rate of change of distance
- Distance/time
- Distance/time
- Speed = MAGNITUDE of velocity (in a straight line where distance=displacement)
- Instantaneous Speed = Magnitude of instantaneous velocity
- Rate of change of distance
- Mass
- Scalars have magnitude only
- Distance
- Addition and Components of Vectors
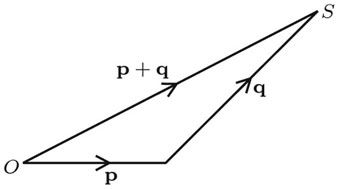
- Addition
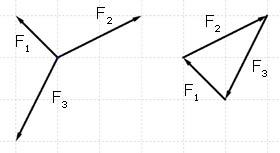
- The resultant of two or more vectors is the single vector that
produces the same effect (magnitude and direction).
- Parallelogram Rule
- A+B=R
- A+B=R
- The resultant of two or more vectors is the single vector that
produces the same effect (magnitude and direction).
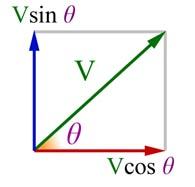
- Components
- F can be resolved into two perpendicular vectors
- F can be resolved into two perpendicular vectors
- Addition
- Vectors
- Motion
- Newton's Laws
- 1st Law
- Every body continues at a state of rest or of uniform (unaccelerated) motion unless acted on by an external force
- Every body continues at a state of rest or of uniform (unaccelerated) motion unless acted on by an external force
- 2nd Law
- The acceleration of a body is directly proportional to the external
force acting on the body and take place in the direction of the force
- F=ma
- The Newton (N) is defined as the force to accelerate a mass of 1kg at 1m/s^2
- The Newton (N) is defined as the force to accelerate a mass of 1kg at 1m/s^2
- F=ma
- The acceleration of a body is directly proportional to the external
force acting on the body and take place in the direction of the force
- 3rd Law
- If A exerts a force on B, then B exerts and equal and opposite force on A
- If A exerts a force on B, then B exerts and equal and opposite force on A
- 1st Law
- SUVAT
- For constant velocity
- s=vt
- s=vt
- For constant acceleration
- v=u+at
- v^2=u^2+2as
- s=ut+½at^2
- s=½(u+v)t
- v=u+at
- For constant velocity
- D-T Graphs
- Gradient=velocity
- Gradient=velocity
- V-T Graphs
- Gradient = Acceleration
- Area under graph = distance
- Gradient = Acceleration
- Conservation of momentum
- The total linear momentum of a system of interacting (colliding)
bodies, on which no external force is acting, remains constant
- If two bodies A and B collide they exert qual and opposite forces on each other
(Newton's 3rd Law), and by Newton's 2nd Law each body experiences the same
acceleration. As the changes are oppositely directed the total change in momentum is 0
- The total linear momentum of a system of interacting (colliding)
bodies, on which no external force is acting, remains constant
- Elastic Collision
- No loss of kinetic energy
- No loss of kinetic energy
- Free Fall
- Galileo
- Dropped balls from the Leaning Tower of Piza to see acceleration during free fall
- He discovered that objects fall at the same speed regardless of their mass
- Dropped balls from the Leaning Tower of Piza to see acceleration during free fall
- Aristotle
- Aristotle assumed that heavier objects would fall faster than lighter ones
- Aristotle assumed that heavier objects would fall faster than lighter ones
- Weight = mass x acceleration in free fall (g)
- W = mg
- W = mg
- Galileo
- Newton's Laws
- Torque (Moments)
- M = Fd
- M = Moment, F = magnitude of Force, d = perpendicular distance
- M = Moment, F = magnitude of Force, d = perpendicular distance
- Couples
- Two forces (equal in magnitude) which are antiparallel.
- Can only produce rotation, not translational motion
- Can only produce rotation, not translational motion
- Moment of couple = One force x separation of forces
- Two forces (equal in magnitude) which are antiparallel.
- Total clockwise moment = Total anticlockwise moment (in equilibrium)
- M = Fd
- Equilibrium, Centre of Mass and COG
- Conditions for equilibrium
- A body is in equilibrium if:
- Acceleration on COM is 0 in all directions and angular acceleration is 0
- A body may still be moving, but with constant
velocity and a constant angular velocity if rotating
- A body may still be moving, but with constant
velocity and a constant angular velocity if rotating
- The resultant force on COM is 0 and the total torque is 0
- Acceleration on COM is 0 in all directions and angular acceleration is 0
- A body is in equilibrium if:
- Concurrent Forces = Forces where the
lines of action meet at a single point
- Triangle of Forces
- Polygon of Forces
- Triangle of Forces
- Types of Equilibrium
- Stable
- Returns to original position
after a slight displacement
- Returns to original position
after a slight displacement
- Unstable
- After displacement, it does not return to its
original position or stay in its displaced position
- After displacement, it does not return to its
original position or stay in its displaced position
- Neutral
- A body stays in its displaced position
after being displaced slightly
- A body stays in its displaced position
after being displaced slightly
- Stable
- Centre of Mass
- The MASS of an
object can be
considered to
act at a single
point
- In a
symmetrical
and uniform
body the
COM is in the
geometric
centre
- The MASS of an
object can be
considered to
act at a single
point
- Centre of Gravity
- A point where the WEIGHT of a body is considered to act
- Can be found by hanging the object with a plumb line
- A point where the WEIGHT of a body is considered to act
- Density = mass / volume
- Pressure = force / area
- Car Safety
- Stopping d = thinking d + braking d
- Affected by conditions, tyre tread etc.
- Affected by conditions, tyre tread etc.
- KE = braking force x braking distance
- Safety features
- Seat belts
- Seat belts are wide and soft, so produce less injury than hitting the windscreen
- Allows time for the airbag to inflate
- Seat belts are wide and soft, so produce less injury than hitting the windscreen
- Crumple zones
- The crumple zones increases the distance the force is
acting, so in sudden deceleration in a crash they
decrease the force enough to save the passengers
- The crumple zones increases the distance the force is
acting, so in sudden deceleration in a crash they
decrease the force enough to save the passengers
- Airbags
- A flexible nylon bag, an accelerometer detects
the crash and starts a chemical reaction,
producing nitrogen to fill the airbag
- A flexible nylon bag, an accelerometer detects
the crash and starts a chemical reaction,
producing nitrogen to fill the airbag
- Seat belts
- GPS
- Trilateration
- A satellite sends out a signal and it arrives after a known
time at the GPS receiver then , given the speed of EM
radiation, the distance of the receiver from the satellite can
be found. The more satellites are used the more accurate
the location is.
- A satellite sends out a signal and it arrives after a known
time at the GPS receiver then , given the speed of EM
radiation, the distance of the receiver from the satellite can
be found. The more satellites are used the more accurate
the location is.
- Trilateration
- Stopping d = thinking d + braking d
- Conditions for equilibrium
- Work, Energy and Power
- W=Fd
- Work done = force x distance moved
- Work done = force x distance moved
- Force at angle to motion
- W = Fdcos(angle)
- W = Fdcos(angle)
- Kinetic energy = ½mv^2
- GPE = mgh
- Therefore, Increase/decrease in GPE = mg(change in h)
- Therefore, Increase/decrease in GPE = mg(change in h)
- Power = energy/time
- Power is the rate of doing work in Watts
- Power is the rate of doing work in Watts
- A pendulum converts GPE into KE and back to GPE,
until it stops as it loses energy in other forms (e.g. heat)
- Sankey Diagrams
- Energy in = Energy out
- Energy in = Energy out
- Efficiency
- (Useful output energy / total input energy) x 100%
- (Useful output energy / total input energy) x 100%
- Deformation
- Elastic
- Returns to original state
- Returns to original state
- Plastic
- Permanently deformed
- Permanently deformed
- Tensile (stretching) force
- Ultimate Tensile Strength
- The maximum amount of tensile force that can be applied to an object before it breaks
- The maximum amount of tensile force that can be applied to an object before it breaks
- Ultimate Tensile Strength
- Compressive (squashing) force
- Elastic
- Hooke's Law
- F = kx
- Work done = ½kx^2
- E = ½Fx = ½kx^2
- After an object is stretched beyond its elastic limit it is plastically deformed
- F = kx
- Young's Modulus
- Stress = Force / Area
- Ultimate Tensile Stress
- The maximum stress
an object can take
before it breaks
- The maximum stress
an object can take
before it breaks
- Ultimate Tensile Stress
- Strain = Extension / Length
- Young's Modulus = Stress / Strain
- Ductile
- Drawn into wires
- Drawn into wires
- Brittle
- Distort very little
- Distort very little
- Stress = Force / Area
- W=Fd
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.