19598220
Description
Mind Map by Diana Carolina Garcia Miranda, updated more than 1 year ago
|
|
Created by Diana Carolina Garcia Miranda
over 4 years ago
|
|
. Vectores en R2 y R3: propiedades de
los vectores, operaciones básicas con
vectores, vectores base, producto
punto y producto vectoria
- VECTORES EN R2 Y
R3
- Contenidos
- Segmentos orientados y vectores. Suma. Propiedades. Distancia entre vectores. Vector unitario.
Vectores canónicos Producto por un escalar. Cosenos directores. Producto escalar. Propiedades y
aplicaciones. Proyecciones ortogonales. Producto vectorial. propiedades y aplicaciones. Producto
mixto. Interpretación geométrica del producto vectorial y producto mixto. Ecuación de la recta en el
espacio. Formas vectorial, paramétrica y simétrica. Ecuación del plano en el espacio. Intersecciones.
- Vectores en el Plano
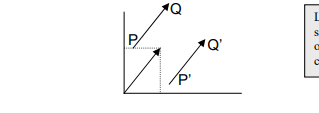
- Hay una concepción geométrica del significado de un vector y una concepción algebraica, ambas
compatibles. → Segmento dirigido PQ es el segmento de recta con origen en P y extremo en Q. Notar
que PQ≠QP.
- Las propiedades que caracterizan de un segmento dirigido son su magnitud o módulo, su dirección y
su sentido. No obstante dos segmentos que sean coincidentes en estas características son distintos si
no son coincidentes en el origen
- Dos segmentos dirigidos son equivalentes si y sólo si tienen igual módulo, dirección y sentido. → →
PQ ≡ P’Q’ Se puede considerar que existen en el plano infinitos vectores equivalentes a un segmento
dirigido PQ. Denominaremos vector PQ, o vector v a todo elemento de ese conjunto.
- Los dos segmentos representados son representantes del vector v. 1 → v se representa trasladando
PQ al origen de coordenadas de R2 En estas condiciones v admite una expresión como par ordenado
en donde el par ordenado indica las coordenadas de su extremo v = (a,b). a y b se denominan también
componentes del vector v. Este concepto es más utilizado desde el punto de vista algebraico.
- El módulo de v es un número real que representa su longitud |v| = √a 2 + b2 (por consecuencia directa
de Pitágoras)
- Ejercicio: Demuestre que: | v |
= 0 ⇔ v = 0
- La dirección de v define un ángulo θ entre v y la dirección del eje
horizontal x (llamado también eje de las absisas) en su sentido
positivo. Dos vectores tienen igual dirección si y sólo si sus ángulos
respectivos con dicho eje son iguales. En tal caso se dice que son
paralelos. El vector nulo no tiene dirección ni sentido. Si v es no nulo y
v1 = 0 ⇒ θ = π⁄2 Si v es no nulo y v1 ≠ 0 ⇒ θ = arc tag( b/a)
- La dirección de v define un ángulo θ entre v y la dirección del eje
horizontal x (llamado también eje de las absisas) en su sentido
positivo. Dos vectores tienen igual dirección si y sólo si sus ángulos
respectivos con dicho eje son iguales. En tal caso se dice que son
paralelos. El vector nulo no tiene dirección ni sentido. Si v es no nulo y
v1 = 0 ⇒ θ = π⁄2 Si v es no nulo y v1 ≠ 0 ⇒ θ = arc tag( b/a)
- Ejercicio: Demuestre que: | v |
= 0 ⇔ v = 0
- El módulo de v es un número real que representa su longitud |v| = √a 2 + b2 (por consecuencia directa
de Pitágoras)
- Los dos segmentos representados son representantes del vector v. 1 → v se representa trasladando
PQ al origen de coordenadas de R2 En estas condiciones v admite una expresión como par ordenado
en donde el par ordenado indica las coordenadas de su extremo v = (a,b). a y b se denominan también
componentes del vector v. Este concepto es más utilizado desde el punto de vista algebraico.
- Dos segmentos dirigidos son equivalentes si y sólo si tienen igual módulo, dirección y sentido. → →
PQ ≡ P’Q’ Se puede considerar que existen en el plano infinitos vectores equivalentes a un segmento
dirigido PQ. Denominaremos vector PQ, o vector v a todo elemento de ese conjunto.
- Las propiedades que caracterizan de un segmento dirigido son su magnitud o módulo, su dirección y
su sentido. No obstante dos segmentos que sean coincidentes en estas características son distintos si
no son coincidentes en el origen
- Hay una concepción geométrica del significado de un vector y una concepción algebraica, ambas
compatibles. → Segmento dirigido PQ es el segmento de recta con origen en P y extremo en Q. Notar
que PQ≠QP.
- Vectores en el Plano
- Segmentos orientados y vectores. Suma. Propiedades. Distancia entre vectores. Vector unitario.
Vectores canónicos Producto por un escalar. Cosenos directores. Producto escalar. Propiedades y
aplicaciones. Proyecciones ortogonales. Producto vectorial. propiedades y aplicaciones. Producto
mixto. Interpretación geométrica del producto vectorial y producto mixto. Ecuación de la recta en el
espacio. Formas vectorial, paramétrica y simétrica. Ecuación del plano en el espacio. Intersecciones.
- Contenidos
- Suma de vectores
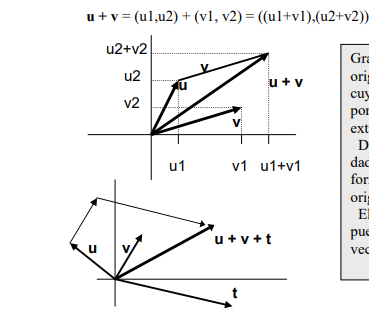
- Gráficamente, se obtiene u + v trasladando el origen de v al extremo de u. El vector suma, cuyas
componentes son (u1+v1, u2+v2) tiene por origen el origen de u y por extremo, el extremo de v. Desde
otro punto de vista, la suma u + v está dada por la diagonal del paralelogramo que forman u y v con sus
pares paralelos, cuyo origen es el origen común. El primero de los criterios de suma gráfica puede
extenderse a la suma de más de dos vectores
- Resta
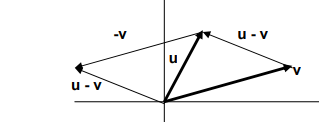
- Restar dos vectores es sumar al primero el opuesto del segundo: u – v = u + (-v) Gráficamente, u - v es
equivalente al segmento orientado cuyo origen es el extremo de v y su extremo es el extremo de u Se
aprecia que v + (u-v) = u
- Distancia entre dos vectores
- La distancia entre u y v debe interpretarse como la distancia entre sus extremos, cuando están
aplicados en un mismo origen. Tendremos en cuenta que podemos representar los elementos de R2
como vectores o como puntos del plano.
- En el gráfico anterior se aprecia que la distancia entre los extremos de u y de v es | u – v |. Esto resulta
práctico para determinar distancias entre puntos del plano, y el concepto puede extenderse a R3 .
Ejemplo: Sean p1 = ( -2, 7) y p2 = ( -6, 4 ) Determinar la distancia entre ambos puntos. Basta considerar a
los puntos como vectores: d p1p2= | p1-p2| = | 4 , 3 | = 5 Producto de un vector por un escalar Sea α ∈
R y v ∈ R2 : α v = (α v1, α v2)
- Producto de un vector por un escalar
- tor por un escalar Sea α ∈ R y v ∈ R2 : α v = (α v1, α v2) |α v | = |α | | v | ya que . |α v | = + √ (α v1)2 + (α
v2)2 = + √ α2 (v12 + v22 ) = |α | |v |
- La dirección de αv no varía si α ≠ 0: Sean θ y θ’ los ángulos que definen las direcciones de v y αv
respectivamente a) Si v1 = 0 y v2 ≠ 0 ⇒ α v1 = 0 y α v2 ≠ 0 ⇒ θ = θ’ = π/2 b) v1 = v2 = 0 es el vector nulo y α v
también c) v1≠ 0 ⇒ tag θ = v2 Tag θ’ = α v2 = v2 ⇒ θ = θ’ ⇒ las direcciones v1 α v1 v1 son iguales
- El sentido se invierte si α < 0, ya que en ese caso | α |v tiene igual sentido que v y αv y | α | v son
opuestos entre sí
- Vector unitario de igual dirección y sentido a un vector dado
- Sea v = (v1,v2) no nulo v’= v es el vector unitario de igual dirección y sentido que v |v| . En efecto: | v’|
= √ ( v1/|v| )2 + ( v2/|v| )2 = √ v12 + v22 = 1 v12 + v22 Además v’ es el producto de v por un escalar por
lo que su dirección no cambia, y tampoco su sentido ya que el módulo nunca es negativo
- Sea v = (v1,v2) no nulo v’= v es el vector unitario de igual dirección y sentido que v |v| . En efecto: | v’|
= √ ( v1/|v| )2 + ( v2/|v| )2 = √ v12 + v22 = 1 v12 + v22 Además v’ es el producto de v por un escalar por
lo que su dirección no cambia, y tampoco su sentido ya que el módulo nunca es negativo
- Vector unitario de igual dirección y sentido a un vector dado
- El sentido se invierte si α < 0, ya que en ese caso | α |v tiene igual sentido que v y αv y | α | v son
opuestos entre sí
- La dirección de αv no varía si α ≠ 0: Sean θ y θ’ los ángulos que definen las direcciones de v y αv
respectivamente a) Si v1 = 0 y v2 ≠ 0 ⇒ α v1 = 0 y α v2 ≠ 0 ⇒ θ = θ’ = π/2 b) v1 = v2 = 0 es el vector nulo y α v
también c) v1≠ 0 ⇒ tag θ = v2 Tag θ’ = α v2 = v2 ⇒ θ = θ’ ⇒ las direcciones v1 α v1 v1 son iguales
- tor por un escalar Sea α ∈ R y v ∈ R2 : α v = (α v1, α v2) |α v | = |α | | v | ya que . |α v | = + √ (α v1)2 + (α
v2)2 = + √ α2 (v12 + v22 ) = |α | |v |
- Producto de un vector por un escalar
- En el gráfico anterior se aprecia que la distancia entre los extremos de u y de v es | u – v |. Esto resulta
práctico para determinar distancias entre puntos del plano, y el concepto puede extenderse a R3 .
Ejemplo: Sean p1 = ( -2, 7) y p2 = ( -6, 4 ) Determinar la distancia entre ambos puntos. Basta considerar a
los puntos como vectores: d p1p2= | p1-p2| = | 4 , 3 | = 5 Producto de un vector por un escalar Sea α ∈
R y v ∈ R2 : α v = (α v1, α v2)
- La distancia entre u y v debe interpretarse como la distancia entre sus extremos, cuando están
aplicados en un mismo origen. Tendremos en cuenta que podemos representar los elementos de R2
como vectores o como puntos del plano.
- Distancia entre dos vectores
- Restar dos vectores es sumar al primero el opuesto del segundo: u – v = u + (-v) Gráficamente, u - v es
equivalente al segmento orientado cuyo origen es el extremo de v y su extremo es el extremo de u Se
aprecia que v + (u-v) = u
- Resta
- Gráficamente, se obtiene u + v trasladando el origen de v al extremo de u. El vector suma, cuyas
componentes son (u1+v1, u2+v2) tiene por origen el origen de u y por extremo, el extremo de v. Desde
otro punto de vista, la suma u + v está dada por la diagonal del paralelogramo que forman u y v con sus
pares paralelos, cuyo origen es el origen común. El primero de los criterios de suma gráfica puede
extenderse a la suma de más de dos vectores
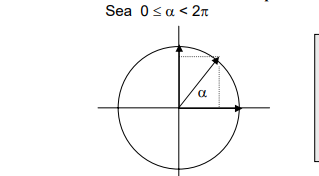
- Vector unitario definido por el ángulo α formado con el eje positivo de las absisas.
- En la circunferencia de radio unitario están inscriptos todos los vectores unitarios de R² (Su distancia al
origen es 1) Dado un α que defina dirección y sentido, el vector unitario v´ correspondiente es: v´ = cosα
i + senα j
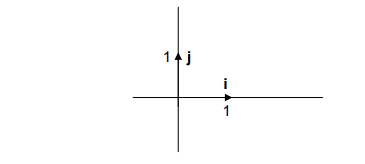
- Vectores canónicos
- Son vectores unitarios paralelos a los ejes coordenados, de sentido según el sentido positivo de dichos
ejes. i = (1, 0) j = (0, 1)
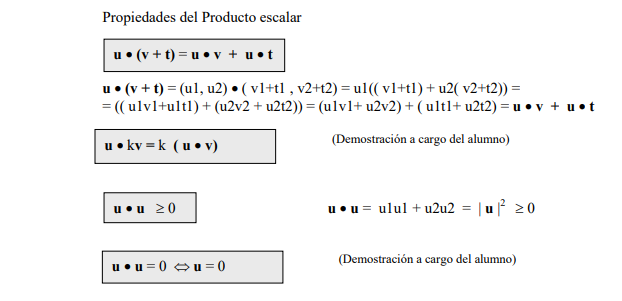
- Producto Escalar
- El producto escalar de dos vectores (producto punto) es el número Real determinado por la suma de
los productos de las coordenadas homólogas de dichos vectores. • = f : R2 x R2 → R Sean u = (u1,u2 ) ;
v = (v1, v2) ⇒ u • v = u1v1 + u2v2
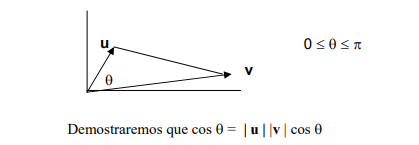
- Ángulo entre dos vectores
- Se define como el menor ángulo positivo determinado por ambos al estar aplicados en un origen
común.
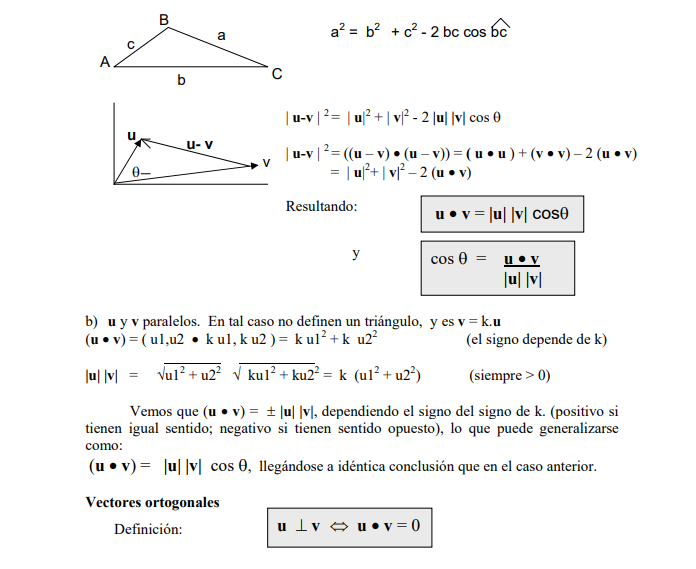
- a) u y v No paralelos Ambos son lados de un triángulo, en el que se puede aplicar el teorema de los
cosenos:
- Se aprecia que a partir de la definición el vector nulo es ortogonal a cualquier otro vector, lo cual es
conveniente para temas posteriores. Cuando los vectores son no nulos la definición concuerda con el
concepto clásico de ortogonalidad, asociado a que el ángulo comprendido entre ambos sea recto. u ⊥
v ⇒ θ = π ⇒ u • v = | u | | v | cosθ = 0 y u • v = 0 ⇒ | u | | v | cosθ = 0 ⇒ algún vector es nulo ó cosθ = 0
⇒ θ = π /2
- Se aprecia que a partir de la definición el vector nulo es ortogonal a cualquier otro vector, lo cual es
conveniente para temas posteriores. Cuando los vectores son no nulos la definición concuerda con el
concepto clásico de ortogonalidad, asociado a que el ángulo comprendido entre ambos sea recto. u ⊥
v ⇒ θ = π ⇒ u • v = | u | | v | cosθ = 0 y u • v = 0 ⇒ | u | | v | cosθ = 0 ⇒ algún vector es nulo ó cosθ = 0
⇒ θ = π /2
- a) u y v No paralelos Ambos son lados de un triángulo, en el que se puede aplicar el teorema de los
cosenos:
- Se define como el menor ángulo positivo determinado por ambos al estar aplicados en un origen
común.
- Ángulo entre dos vectores
- El producto escalar de dos vectores (producto punto) es el número Real determinado por la suma de
los productos de las coordenadas homólogas de dichos vectores. • = f : R2 x R2 → R Sean u = (u1,u2 ) ;
v = (v1, v2) ⇒ u • v = u1v1 + u2v2
- Producto Escalar
- Son vectores unitarios paralelos a los ejes coordenados, de sentido según el sentido positivo de dichos
ejes. i = (1, 0) j = (0, 1)
- Vectores canónicos
- En la circunferencia de radio unitario están inscriptos todos los vectores unitarios de R² (Su distancia al
origen es 1) Dado un α que defina dirección y sentido, el vector unitario v´ correspondiente es: v´ = cosα
i + senα j
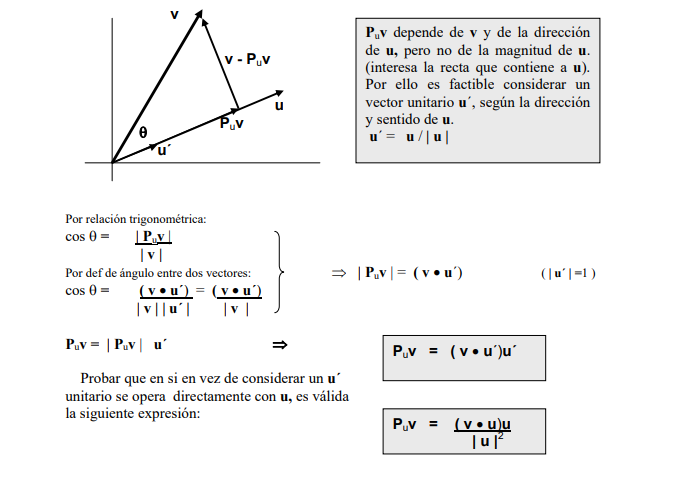
- Proyecciones ortogonales
- Las proyecciones ortogonales de v = (v1,v2) sobre los ejes cartesianos son: Px v = v1 i ; Pyv = v2 j Se
verifica que: v = Px v + Pyv y Px v ⊥ Pyv Es posible abordar el problema en forma más general y
determinar las proyecciones sobre una dirección cualquiera, no necesariamente paralela a los ejes.
- Es posible abordar el problema en forma más general y determinar las proyecciones sobre una
dirección cualquiera, no necesariamente paralela a los ejes.
- Determinar la proyección de v = (-2, 6) sobre la recta que pasa por el origen cuya
ecuación es y=2x Un vector que pertenece a la recta es de la forma: u= (u1, 2u1)
Tomando u1 = 1 resulta u = (1, 2) ⇒ | u | = √5 u´= (1,2) = (√5, 2√5) √5 5 5 Puv = ( v •
u´) u´ = 1/5[ (-2, 6) • (√5, 2√5) ] u´ = -2√5 + 12√5 = 5 = 2√5 u´= ( 2, 4) También es
posible plantear directamente: Puv = ( v • u) u = [(-2, 6) • (1, 2)] (1, 2)= 2 ( 1, 2) = (2,
4) | u |2 5
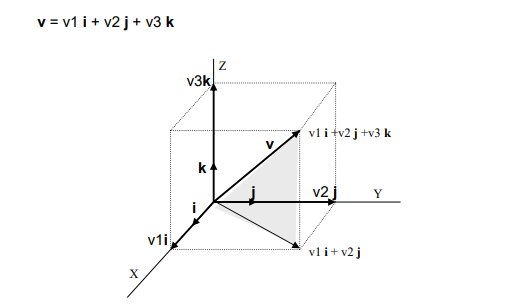
- Vectores en R3
- Similares conceptos a los planteados en R2 pueden aplicarse a R3. Vector de R3 es toda terna
ordenada de Nos reales. v = (v1,v2,v3) Para su representación se utilizan tres ejes ortogonales
llamados ejes cartesianos X,Y,Z Se pueden plantear dos esquemas de representación, denominados
“mano derecha” y mano izquierda. Generalmente se usa el de la mano derecha
- En el primero, el índice de la mano derecha representa al eje X, el pulgar al eje Z y el anular al eje Y
(en posición de la mano propia enfrentada al observador). El sentido de rotación X → Y → Z es
anti-horario, como el empleado para medir ángulos En el segundo, se considera el mismo esquema,
pero con la mano izquierda. El sentido de rotación X → Y → Z es horario, o sea contrario al utilizado
para medir ángulos
- Vectores canónicos en R³
- Puede verificarse que los mismos son ortogonales entre sí, comprobando que el producto escalar es
nulo para cualquier par Todo vector de R3 se puede escribir como suma de los vectores canónicos
multiplicados por un escalar. Cada término es la proyección del vector sobre el eje coordenado
correspondiente. Se dice que v es combinación lineal de los vectores canónicos, concepto que se
estudiará en detalle en la unidad siguiente.
- La dirección y el sentido de v quedan unívocamente determinados por los ángulos que forma v con
cada uno de los ejes de coordenadas. Los cosenos de cada uno de dichos ángulos se denominan
cosenos directores del vector.
- La dirección y el sentido de v quedan unívocamente determinados por los ángulos que forma v con
cada uno de los ejes de coordenadas. Los cosenos de cada uno de dichos ángulos se denominan
cosenos directores del vector.
- Puede verificarse que los mismos son ortogonales entre sí, comprobando que el producto escalar es
nulo para cualquier par Todo vector de R3 se puede escribir como suma de los vectores canónicos
multiplicados por un escalar. Cada término es la proyección del vector sobre el eje coordenado
correspondiente. Se dice que v es combinación lineal de los vectores canónicos, concepto que se
estudiará en detalle en la unidad siguiente.
- Vectores canónicos en R³
- En el primero, el índice de la mano derecha representa al eje X, el pulgar al eje Z y el anular al eje Y
(en posición de la mano propia enfrentada al observador). El sentido de rotación X → Y → Z es
anti-horario, como el empleado para medir ángulos En el segundo, se considera el mismo esquema,
pero con la mano izquierda. El sentido de rotación X → Y → Z es horario, o sea contrario al utilizado
para medir ángulos
- Similares conceptos a los planteados en R2 pueden aplicarse a R3. Vector de R3 es toda terna
ordenada de Nos reales. v = (v1,v2,v3) Para su representación se utilizan tres ejes ortogonales
llamados ejes cartesianos X,Y,Z Se pueden plantear dos esquemas de representación, denominados
“mano derecha” y mano izquierda. Generalmente se usa el de la mano derecha
- Vectores en R3
- Es posible abordar el problema en forma más general y determinar las proyecciones sobre una
dirección cualquiera, no necesariamente paralela a los ejes.
- Las proyecciones ortogonales de v = (v1,v2) sobre los ejes cartesianos son: Px v = v1 i ; Pyv = v2 j Se
verifica que: v = Px v + Pyv y Px v ⊥ Pyv Es posible abordar el problema en forma más general y
determinar las proyecciones sobre una dirección cualquiera, no necesariamente paralela a los ejes.
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.