17180565
Description
Mind Map by Diego Fernando Ibañez Suarez, updated more than 1 year ago
More
ESTATICA DE CUERPOS RIGIDOS
- EQUILIBRIO DE CUERPOS RIGIDOS
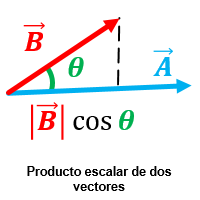
- PRODUCTO
ESCALAR
- Se le denomina producto
escalar (o producto punto o
producto interno) de dos
vectores A y B a un escalar
cuyo valor será igual al
producto de sus módulos
multiplicado por el coseno
del ángulo que ellos forman
- Se le denomina producto
escalar (o producto punto o
producto interno) de dos
vectores A y B a un escalar
cuyo valor será igual al
producto de sus módulos
multiplicado por el coseno
del ángulo que ellos forman
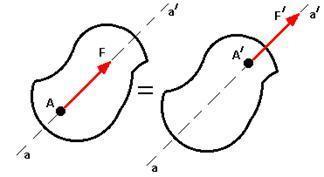
- PRINCIPIO DE LA
TRANSMISIBILIDAD
- Una fuerza aplicada sobre un cuerpo
rígido puede ser reemplazada por
cualquier otra fuerza que tenga la
misma intensidad y el mismo sentido y
la misma dirección que la fuerza
original y que se aplique sobre
cualquier punto de su línea de acción
- Una fuerza aplicada sobre un cuerpo
rígido puede ser reemplazada por
cualquier otra fuerza que tenga la
misma intensidad y el mismo sentido y
la misma dirección que la fuerza
original y que se aplique sobre
cualquier punto de su línea de acción
- MOMENTO DE FUERZA CON
RESPECTO A UN PUNTO
- Se denomina momento de una fuerza a un punto, al
producto vectorial del vector posición r de la fuerza
por el vector fuerza F . Cuando se aplica una sola
fuerza en forma perpendicular a un objeto, el
momento de torsión o torca se calcula con la
siguiente fórmula: M = F.r Dónde: M = momento de
torsión o torca en Newton-metro (Joule). F = fuerza
aplicada al objeto en Newtons. r = brazo de palanca
o longitud del punto donde se aplica la fuerza
respecto al punto considerado en metros.
- Se denomina momento de una fuerza a un punto, al
producto vectorial del vector posición r de la fuerza
por el vector fuerza F . Cuando se aplica una sola
fuerza en forma perpendicular a un objeto, el
momento de torsión o torca se calcula con la
siguiente fórmula: M = F.r Dónde: M = momento de
torsión o torca en Newton-metro (Joule). F = fuerza
aplicada al objeto en Newtons. r = brazo de palanca
o longitud del punto donde se aplica la fuerza
respecto al punto considerado en metros.
- MOMENTO DE
UN PAR
- Un par de fuezas son dos fuerzas de igual
intensidad y sentido contrario, separadas
por una distancia d llamada brazo del par.
Aunque la resultante de dos fuerzas iguales
y de sentido contrario es nula, la resultante
de los momentos de un par de furzas no lo
es. El momento de un par de fuerzas es un
vector libre perpendicular al plano del par y
de sentido determinado por la regla de la
mano derecha o del sacacorchos.
- Un par de fuezas son dos fuerzas de igual
intensidad y sentido contrario, separadas
por una distancia d llamada brazo del par.
Aunque la resultante de dos fuerzas iguales
y de sentido contrario es nula, la resultante
de los momentos de un par de furzas no lo
es. El momento de un par de fuerzas es un
vector libre perpendicular al plano del par y
de sentido determinado por la regla de la
mano derecha o del sacacorchos.
- PRODUCTO
VECTORIAL
- El producto cruz o producto vectorial
de dos vectores contenidos en el
plano, es otro vector cuya dirección es
perpendicular a los dos vectores.
Geométricamente, el módulo del
producto cruz de dos vectores coincide
con el área del paralelogramo que
tiene por lados a esos vectores.
- El producto cruz o producto vectorial
de dos vectores contenidos en el
plano, es otro vector cuya dirección es
perpendicular a los dos vectores.
Geométricamente, el módulo del
producto cruz de dos vectores coincide
con el área del paralelogramo que
tiene por lados a esos vectores.
- SISTEMA EQUIVALENTE
DE FUERZAS
- Dos sistemas de fuerzas se dice que
son equivalentessi producen el
mismo efecto exterior al aplicarlos al
un cuerpo rigido. La resultante de un
siistema equivalente, esta dado en
funcion de que sistema se trate que
pueden ser; una unica fuerza, un par
o una fuerza yy un par
- Dos sistemas de fuerzas se dice que
son equivalentessi producen el
mismo efecto exterior al aplicarlos al
un cuerpo rigido. La resultante de un
siistema equivalente, esta dado en
funcion de que sistema se trate que
pueden ser; una unica fuerza, un par
o una fuerza yy un par
- EQUILIBRIO DE UN CUERPO
RIGIDO EN EL PLANO
- En problemas bidimensionales
las ecuaciones se reducen a
tres, número que corresponde
a los grados de libertad de un
movimiento plano; dos de
translación y uno de rotación.
- En problemas bidimensionales
las ecuaciones se reducen a
tres, número que corresponde
a los grados de libertad de un
movimiento plano; dos de
translación y uno de rotación.
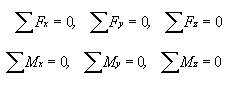
- EQUILIBRIO DE CUERPO
RIGIDO EN EL ESPACIO
- Cuando un elemento se encuentra
sometido a varias fuerzas que hacen que
el cuerpo este en reposo o en movimiento
con VELOCIDAD CONSTANTE, entonces se
dice que se encuentra en estado de
equilibrio. Si en un cuerpo sus
dimensiones son considerables respecto a
sus posibles trayectorias, entonces se dice
que se trata de un cuerpo rígido y que si
esta en equilibrio se cumple que:
- Cuando un elemento se encuentra
sometido a varias fuerzas que hacen que
el cuerpo este en reposo o en movimiento
con VELOCIDAD CONSTANTE, entonces se
dice que se encuentra en estado de
equilibrio. Si en un cuerpo sus
dimensiones son considerables respecto a
sus posibles trayectorias, entonces se dice
que se trata de un cuerpo rígido y que si
esta en equilibrio se cumple que:
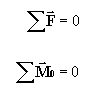
- Es cuando un cuerpo esta sometido
a un sistema de fuerzas, que la
resultante de todas las fuerzas y el
momento resultante son igual a
cero
- PRODUCTO
ESCALAR
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.