25090936
Descrição
Quiz por Exsto Tecnologia, atualizado more than 1 year ago
|
|
Criado por Exsto Tecnologia
mais de 3 anos atrás
|
|
Questão 1
Questão
O objetivo de um robô colaborativo é
Responda
-
Realizar tarefas domésticas para auxiliar o ser humano
-
Colaborar com outros robôs, executando tarefas mais simples
-
Trabalhar próximo ao ser humano, sem necessidade de clausura
-
Ser um robô demonstrativo para feiras e eventos
Questão 2
Questão
A vantagem dos Autonomous Mobile Robots (AMRs) em comparação com os Automated Guided Vehicles (AGVs) é:
Responda
-
Os AMR possuem sistema de navegação inteligente, sendo capazes de criar suas próprias rotas
-
Os AMR têm uma estrutura mais robusta, com isso têm uma maior capacidade de carga
-
Os AMR possuem sensores de identificação de tiras magnéticas, usadas como guias das suas rotas
-
Os AMR possuem bateria própria enquanto os AGV precisam estar constantemente conectados na rede elétrica
Questão 3
Questão
Robos SCARA apresentam
Responda
-
Baixa Velocidade e movimentação de peças em qualquer plano
-
Alta Velocidade e movimentação de peças em qualquer plano
-
Alta Velocidade e movimentação de peças em planos paralelos à base
-
Alta Velocidade e movimentação de peças em um único Plano
Questão 4
Questão
Grau de liberdade significa
Responda
-
O Número de movimentos independentes de um Robô
-
O ângulo máximo de alcance de um eixo do robô
-
A capacidade do robô tomar decisões de movimento de forma inteligente
-
A capacidade do robô tomar decisões de parada de emergência de forma inteligente
Questão 5
Questão
Qual componente é responsável por executar os Movimentos do Robô?
Responda
-
O Controlador
-
O Manipulador
-
O Teach Pendant
-
O Servomotor
Questão 6
Questão
Braços robóticos podem ser fixados e trabalhar tanto na horizontal quanto na vertical?
Responda
-
Sim, todos os braços robóticos podem trabalhar na horizontal e na vertical
-
Apenas alguns braços robóticos podem trabalhar na horizontal e na vertical
-
Não, nenhum braço robótico pode trabalhar na horizontal e na vertical
Questão 7
Questão
Qual dos itens não é considerado um meio de Controle de Riscos ao Trabalhador ao se trabalhar com Robôs de alto desempenho?
Responda
-
Cortina de Luz
-
Pulseira Eletrostática
-
Sensor de Abertura de Porta
-
Proteções fixas
Questão 8
Questão
O que significa colocar o robô em manual e em automático respectivamente?
Responda
-
Operar o Robô Manualmente com velocidade real / Executar o programa de forma automática com a velocidade programada
-
Operar o Robô Manualmente com velocidade reduzida / Deixar que o Robô aprenda os movimentos automaticamente
-
Operar o Robô Manualmente com velocidade reduzida porém executar o programa na velocidade real / Executar o programa de forma automática com a velocidade programada
-
Operar o Robô Manualmente com velocidade reduzida inclusive na execução do programa / Executar o programa de forma automática com a velocidade programada
Questão 9
Questão
Em Robótica qual o significado do termo TCP?
Responda
-
Transmission Control Protocol
-
Tool Center Point
-
Terminal de Contêiners de Paranaguá
-
Protocolo de Internet
Questão 10
Questão
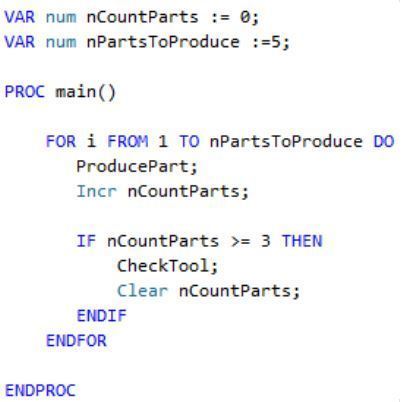
Analise o trecho do programa a seguir e responda respectivamente. Quantas peças serão produzidas em cada ciclo? Quantas peças serão produzidas antes de uma verificação de ferramenta ser executada? Quantas vezes a ferramenta terá sido verificada após cinco ciclos de programa?
{kind=link}
Responda
-
6, 3 e 8
-
5, 4 e 8
-
5, 3 e 5
-
5, 3 e 8
Quer criar seus próprios Quizzes gratuitos com a GoConqr? Saiba mais.