38456076

| Question | Answer |
| ¿Qué es una constante perceptual? ¿Cuáles son? | Una constante perceptual es la capacidad perceptiva de mantener la identidad del objeto pese a las diferentes formas en que se nos presenta. Las constantes perceptuales son: Dimensión. Posición. Orientación. Forma. - Equivalencia de forma. -->Propiedades invariantes. -->Marcos de referencia. -Identidad de forma. |
| Explica en qué consiste la constante perceptual de la dimensión ¿Qué mecanismos la producen? | Somos capaces de reconocer un objeto pese a que tenga cambios en la dimensión. Un objeto cambia de dimensión cuando se acerca o se aleja. Los objetos se mantienen constantes en sus dimensiones a pesar de la distancia o las dimensiones de su imagen en la retina (estímulo proximal). Hay dos mecanismos que producen la percepción constante de la impresión del tamaño presente en la percepción del objeto: Cálculo automático de la dimensión del objeto: deducida de la distancia al objeto y el tamaño de su imagen retinal. Cálculo de la dimensión del objeto por su inserción en el gradiente del espacio físico. |
| ¿Dónde se observa la constante perceptual de la dimensión? | Se puede observar en las ilusiones: Percibimos uno más grande que otro, aunque sean del mismo tamaño en realidad, porque hay inductores de percepción de profundidad: convergencia de líneas paralelas. Visualmente, en la posición óptica del perceptor visual que tenga delante unas líneas paralelas con profundidad, se apreciarán como líneas convergentes. Cuanto más lejos estén, aparecen más juntas. La imagen simula cómo se ve el espacio en profundidad. |
| ¿Qué tipo de percepción es necesaria para que se observe la dimensión como una constante perceptual? | Para poder establecer la constante de dimensión, necesito la profundidad. Si no fuera capaz de estimar la dimensión de profundidad, los objetos crecerían o disminuirían: Percepción de profundidad Por ejemplo, en la imagen todas las monedas ocupan 2 baldosas. Se puede establecer la constante, teniendo en cuenta la profundidad como criterio, de modo que, si el mismo objeto se aleja, lo vemos más pequeño y más grande si se acerca. Respecto al horizonte, los objetos terrestres suben y los aéreos bajan a medida que se alejan. |
| ¿Cómo se explica la ilusión lunar? | Ejemplo clásico: percepción de la ilusión del tamaño de la Luna. Cuando vemos la luna en el horizonte parece que es más grande. Demuestra que el cálculo perceptivo del tamaño por el sistema visual puede cometer errores. Todos los objetos terrestres están sometidos a un gradiente de distancia. Si algo se aleja, reduce el tamaño visual. Pero, de alguna manera, hacemos la misma inferencia sobre los astros. Aplicamos la misma lógica de nuestro nicho ecológico a objetos que no están a una distancia donde eso funcione. En el horizonte “debería estar más lejos” pero eso no ocurre; aplicamos ese criterio ecológico y la vemos más grande. |
| Explica en qué consiste la constante perceptual de la posición | Al percibir una imagen natural, se producen múltiples movimientos de la cabeza, del globo ocular y de los objetos presentes en ella. Somos capaces de hacer una constante en la percepción de un objeto, aunque cambie su posición dentro del campo visual. Para poder saber que es la misma casa (establecer la constante), necesito saber cómo me muevo (hacia la derecha, hacia la izquierda, hacia delante o hacia atrás. En el caso de la posición, necesito controlar mi propio movimiento. Los bebés que no controlan el movimiento, ya que no tienen musculatura desarrollada apara sujetar bien la cabeza, no se pueden controlar los cambios en el campo visual. Todavía no está claro cómo realizamos este cálculo. Por ejemplo: si veo que me muevo en una dirección y el objeto en dirección contraria, puedo pensar que el objeto no se ha movido. Si me desplazo y no cambia el punto, fijación ocular: sigo el objeto con la mirada. |
| ¿Qué son los movimientos de seguimiento ocular? | Movimiento que solo puedo hacer con un objeto externo: seguirlo lentamente a lo largo de un borde. Si intento seguir un borde sin un objeto que lo recorra por encima, voy “a saltos” (movimientos sacádicos: el sistema visual tiende a ir más rápido). Es una función psicológica que necesita de un objeto externo para poder ocurrir. |
| ¿Cuáles son las teorías aferente y efecrente de reconocimiento de la posición? | Movimiento que solo puedo hacer con un objeto externo: seguirlo lentamente a lo largo de un borde. Si intento seguir un borde sin un objeto que lo recorra por encima, voy “a saltos” (movimientos sacádicos: el sistema visual tiende a ir más rápido). Es una función psicológica que necesita de un objeto externo para poder ocurrir. |
| ¿Cómo se produce el reconocimiento de la posición según la teoría de Helmholtz? | El nervio motor del ojo es el III par craneal (oculomotor) y tiene estación de relevo en los colículos superiores, que lo controlan. El ojo tiene 6 músculos: 2 laterales a ambos lados que permiten girar; 2 arriba y abajo; 2 que lo rodean por arriba y por abajo. El cerebro da una orden y los ojos se mueven. Pasan dos cosas: Se mueve la escena visual. Hay señales aferentes del ojo: mecanorreceptores en las fibras musculares. Hay una neurona que abraza fibras musculares, de forma que cuando se contraen y se estiran generan potenciales de acción para informar sobre cuánto se han movido Cuando el cerebro manda mover el ojo, recibe dos tipos de información: La imagen que se mueve por un lado Cuánto he movido el ojo (fibras musculares). Para saber cuánto me he movido: copia eferente. El propio encéfalo genera una copia de la orden. Hay un feedback sensorial, sensaciones propioceptivas (aferencia). |
| ¿Por qué se produce el fenómeno del miembro fantasma? | El fenómeno de miembro fantasma se produce porque, al dar la orden motora, esa no va a ningún lado; no hay aferencia muscular. No hay desplazamiento, sensación del miembro; pero queda la copia motora, las órdenes que he dado del movimiento sí están a nivel encefálico. Se explica como que sigues dando la orden, pero no hay feedback que permita parar la tensión. |
| Explica en qué consiste la constante perceptual de la orientación | Reconocer el objeto pese a los cambios en su orientación respecto al perceptor. Son las rotaciones. Soy capaz de estimar cambios de orientación. Ejemplo de las F: reconocimiento de objetos pese a la rotación. La forma de reconocer es la de las gráficas de tiempos de reconocimiento: cuanto más tardas en responder es porque llevas a cabo un procesamiento más complejo. Hay dependencia de la orientación: reconozco más rápido cuando coincide con la orientación habitual. Según aumento la rotación, aumento los tiempos de respuesta. Somos simétricos: tardo lo mismo hasta 180º que si lo hago hacia el otro lado (en el sentido de las agujas del reloj y en sentido contrario). Soy capaz de reconocer a izquierda o derecha: los tiempos son más o menos simétricos. |
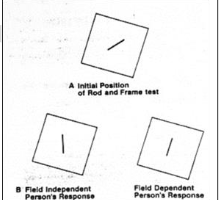
| ¿Qué quiere decir ser o no dependientes del campo? ¿A qué constante perceptual afecta? | Afecta a la orientación Hay dos tipos de personas: dependientes e independientes de campo. Se comprobaba mediante el test del marco y la barra. Ponían un marco a distancia, una barra en medio, y te pedían que la orientaras verticalmente con respecto al marco. La capacidad de rotación es variable: Dependientes de campo: se ven afectados por la estructura del marco, pierden la verticalidad. Independientes de campo: podían ponerla recta perfectamente. Tiene mayor connotación positiva. |
| Explica en qué consiste la constante perceptual de las formas | Al inclinar un papel con formas dibujadas, se generan transformaciones de forma. En términos formales, el círculo ya no es un círculo, sino que tiene una deformación. Somos capaces de percibir la identidad o permanencia del objeto pese a que tenga transformaciones en su forma. Hay muchas cosas que transforman la forma de un objeto. Por ejemplo, en la figura hay sensación de profundidad. Veo volumen porque vemos que lo de arriba está más tumbado; sigue siendo un cuadrado, pero ya no se ve así porque está inclinado. Asumes que todos los componentes texturales son cuadrados. La constante de forma tiene que ver con qué propiedades del objeto pueden cambiar y que tú percibas aún el objeto. |
| ¿Qué operaciones de transformación pueden ser realizadas sin que el objeto cambie su forma? | Translaciones: cambio de posición. Rotaciones: cambio de orientación. Reflexiones: cambio de sentido. Dilataciones: cambio de tamaño. |
| ¿Qué dos teorías se han propuesto para explicar que sigamos manteniendo la identidad de un objeto aunque este sufra algún cambio? | Propiedades invariantes Marcos de referencia |
| ¿En qué consiste la teoría de las propiedades invariantes? | El sistema visual computa de manera automática todas las propiedades que permanecen invariantes en un objeto en cualquier posible transformación de semejanza. Distingue entre propiedades variantes e invariantes. Así, asumiría que dos objetos tienen la misma forma cuando presentan el mismo conjunto de propiedades invariantes. Las operaciones de transformación presentadas antes dejarían al objeto igual, manteniendo su identidad. Si son planas, no cambian la forma del objeto. Puedo reconocer la forma siempre que los cambios sigan los principios de propiedades invariantes: posición, orientación, tamaño y sentido. Sin embargo, esta teoría no ofrece solución para experiencias perceptivas como el cuadrado de Mach. |
| ¿Qué es el cuadrado de Mach? ¿QUé teoría refuta? | Cuadrado de Mach: si uno de sus lados se apoya en el suelo, se percibe como un cuadrado; pero si se apoya sobre uno de sus vértices, se percibe como un rombo. En el fondo, es el mismo objeto rotado. Mantiene las mismas propiedades formales, invariantes, pero cambia el efecto perceptivo. Es como si usáramos un eje diferente para verlo. La percepción no es exactamente que haya un conjunto de transformaciones que dejen la misma forma. El cuadrado muestra que, a pesar de que se mantenga invariante la forma, esa teoría no funciona. (teoría de propiedades invariantes) |
| ¿En qué consiste la teoría de marcos de referencia? | Operamos con otros principios; utilizamos unos marcos en los que situamos el objeto: marcos de referencia. Son los que permiten reconocer los objetos en sus diferentes posiciones u orientaciones. Esto explica que el cuadrado de Mach se perciba como n cuadrado si lo percibimos en relación a un marco de referencia que traza sus ejes perpendiculares a cada uno de los lados; lo percibiremos, en cambio, como un rombo si el marco de referencia traza sus ejes pasando por los cuatro vértices del cuadrado. El reconocimiento de la identidad de la forma no solo tiene en cuenta los invariantes de la figura, sino también el marco de referencia desde el que se percibe. La equivalencia de forma de dos objetos se percibe cuando los dos presentan la misma distribución de invariantes en relación a sus marcos de referencia. Además, los marcos de referencia influyen en la aplicación de las leyes clásicas de la Gestalt. |
| ¿Cuáles son las claves para seleccionar el marco de referencia? | Orientación gravitacional Ejes de simetría reflexiva -Ejes de enlongación -Orientación del contorno -Orientación de la textura -Orientación del contexto -Movimienton gravitacional |
| ¿En qué consiste la clave de orientación gravitacional para la selección de un marco de referencia? | Tenemos tendencia a la verticalidad. Para observar e identificar un objeto, lo alineamos con los ejes vertical y horizontal. Colocamos el eje horizontal-vertical a todos los objetos. Si coinciden, somos buenos detectándolo. Si los objetos tienen sensaciones oblicuas, es más difícil. En A es más fácil el rectángulo, en B no está tan claro. En un triángulo equilátero, por ejemplo, hay 3 ejes de simetría; si uno coincide con la gravitacional, tendemos a ese (el vertical). En alineaciones, se toma un eje que coincida para todos. Un marco de referencia me permitiría alinear los 3 con la misma configuración. Pero, al elegir un marco de referencia, vale para toda la configuración de la imagen. Es difícil, en una agrupación, ver ciertos elementos con una orientación y otros con otra. |
| ¿En qué consiste la clave de ejes de simetría reflexiva para la selección de un marco de referencia? | Es más fácil establecer la semejanza entre formas con diferente rotación si la figura es simétrica. Si tengo una F en una tarea de rotación, si me dicen que debo saber si las F son las mismas, la más sencilla es la normal y aumentará el tiempo de respuesta con la rotación. Los tiempos de repuesta no son iguales con todas las letras: con la A es menos porque tiene un eje de simetría. La A tiene una función en U más atenuada. Resulta más fácil colocar las rotaciones. No todos los objetos tienen la misma saliencia perceptiva. Los objetos en los que puedo marcar un eje son perceptivamente más fáciles de percibir. En el cuadrado de Mach caben dos posibles ejes simétricos, y por ello la elección de uno u otro puede ser ambigua. |
| ¿En qué consiste la clave de ejes de de elongación para la selección de un marco de referencia? | Dentro de los ejes de simetría del objeto, tenderemos a verlo según el eje de elongación: el que divide el objeto por el lado más largo. En objetos con formas diferentes, definir su geometría es más difícil. Índice de dificultad del objeto: es más fácil percibirlo cuando tiene esas propiedades que permanecen iguales aunque lo rotemos, movamos, etc. Van aumentando su complejidad hacia abajo en la imagen. |
| ¿Cómo afecta la orientación del contorno para la selección de un marco de referencia? | La forma del contorno de los objetos es también con frecuencia un factor que sugiere al sistema visual la forma en que trazar el marco de referencia |
| ¿Cómo afecta la orientación de la textura? para la selección de un marco de referencia? | Para que la textura produzca efectos en orden al marco de referencia debe ser de grano grueso y grande, que destaque fuertemente en la imagen. Si la textura tiene una orientación determinada, los ejes tenderán a colocarse congruentemente con esa orientación. |
| ¿Cómo afecta la orientación del contexto para la selección de un marco de referencia? | Cuando un conjunto de elementos se presentan orientados de forma definida, el marco de referencia para percibir la forma de otro objeto situado entre ellos se elegirá de manera que resulte lo más congruente posible con el conjunto circundante. |
| ¿Cómo afecta el movimiento para la selección de un marco de referencia? | Cuando un objeto, se presenta en movimiento, uno de los ejes del marco de referencia se alinea con la misma dirección del movimiento. |
| ¿Qué es el reconocimiento de patrones? | Capacidad para reconocer e identificar un objeto. |
| ¿Qué dos grandes aproximaciones hay dentro de los modelos de reconocimiento de patrones? | Comparación de plantillas: entiende el reconocimiento como un problema de comparación entre el patrón de estimulación y un conjunto de plantillas de los posibles objetos. Reconocer un patrón de estimulación depende de que lo compare con una representación. Análisis de características: entiende el reconocimiento como el resultado de un proceso progresivo de extracción de rasgos o características, unido a una toma de decisión final. Definimos un objeto con un conjunto de propiedades, y damos el reconocimiento cuando se cumplen esas propiedades. |
| ¿En qué consiste el modelo de comparación de plantillas? | El patrón de señales procedentes del detector se compara con cada plantilla ubicada en el comparador. Esta teoría se ha llevado a la industria para los códigos de barras: codificación numérica que da información sobre un producto. A partir del ancho de las barras blancas y negras tiene un comparador. Esos códigos van por tamaños. |
| ¿Qué problemas tiene el modelo de comparación de plantillas? | Diferencia de tamaño estímulo-plantilla: si el tamaño es diferente, no se puede reconocer. Diferentes puntos de vista de un objeto: la plantilla solo vale para una perspectiva concreta del objeto. Requeriría que, para poder reconocer un objeto, necesitaría plantillas para todas sus posiciones. Diferentes versiones del mismo objeto: si cambiamos el “tipo”, la plantilla no sirve (tipos de letras, de perros, de coches…). Demanda de un número infinito de plantillas: una por cada objeto, tipo, color, punto de vista… En caso de la visión humana hay un segundo formato, los analizadores de características. |
| ¿En qué consiste el modelo de análisis de las características? | El proceso se lleva a cabo de forma progresiva, mediante diferentes fases de análisis de características. Permite análisis en paralelo. Descompone las imágenes en los componentes esenciales, para los que tiene detectores específicos. En ellos, se compara a través de redes neurales. Hay algún tipo de unidad que descompone las características y las analiza. OCR (reconocimiento óptico de caracteres): permiten coger una fotografía y hacer con ella un reconocedor de letras, convertirlo en texto editable. Hay sistemas para que esto no funcione: capcha, hacer que un robot no pueda responder, que no pueda operar por reconocimiento de patrones o plantillas. Los sistemas más básicos descomponen partes del objeto. Por ejemplo, la R es un identificador. Para poder reconocerla, descompongo sus características y al integrar la actividad descubro los patrones con los que comparar. El reconocimiento se produce por la identificación de unos primitivos volumétricos llamados GEONES (36 cilindros, sólidos, rectangulares y pirámides), es decir, depende de la suma de características activadas. |
| ¿Qué problemas presenta el modelo de análisis de características? | Estímulos compuestos: dificultad para explicar estímulos de carácter más global. Si defino un perro por un conjunto de características, el problema está en el agrupamiento. Únicamente conociendo las características no puedo conocer el estímulo completo. Por ejemplo, con los componentes de la R podría hacer una figura diferente, poniéndolos en distinta posición. Leyes de la Gestalt: dificultad para explicar las leyes de agrupamiento y segregación de la Gestalt. “Binding problem”: ¿cómo sabemos qué características corresponden con qué objeto? Segregación Combinación Homúnculo: ¿quién decide? ¿Cómo? |
| ¿Por qué es difícil explicar el reconocimiento? | Nosotros somos capaces de reconocer objetos que no vemos completos: Hacer visiones parciales de objetos (que no se pueden hacer con plantillas). Desde un punto de vista concreto. Con partes ocultas por la presencia de otros objetos. Normalmente, esto no supone un problema para la percepción, pero al ser tan versátil es extremadamente difícil de comprender y de replicar en la inteligencia artificial. Un ejemplo de visión parcial: El objeto de la derecha también es una manzana, aunque no se vea entera. Cuando intentamos dibujarlo, lo completamos. |
| ¿Cómo resolvemos los problemas de oclusión la mayoría de las veces? | utilizando lo que sabemos sobre los objetos del mundo. |
| ¿Cuáles son los efectos contextuales? | Bottom-up: el procesamiento debe partir necesariamente de las unidades básicas. Esta parte del procesamiento pertenece principalmente a niveles inconscientes del sistema visual. Los gestaltistas no aceptarían fácilmente estos presupuestos ya que para ellos la actuación inconsciente y mecánica, preatentiva, del sistema visual produciría desde el principio unidades o gestalten perceptivas. Top-down: el procesamiento perceptivo está influido por estructuras y contenidos ya construidos en la mente del sujeto, es decir, por estructuras cognitivas. Desde los mecanismos superiores de la mente del sujeto se influye hacia abajo en la organización perceptiva final de la imagen. |
| ¿Qué sugieren nuestras habilidades para resolver problemas perceptivos como el de oclusión, etc.? --> bottom up o top-down? | Nuestras habilidades para resolver estos problemas sugieren que gran parte del reconocimiento tiene lugar como un proceso top-down, en vez de bottom-up: Buscamos de forma activa lo que nos interesa en la escena. Tenemos expectativas en función del contexto o de las experiencias previas. Por ejemplo, los niños ven las monedas más o menos grandes en función de su estado económico. Ignoramos lo que no es relevante. No vemos aquello que no esperamos. |
| ¿Cómo se enfrenta el sujeto a figuras imposibles? | En un primer momento no hay duda de que la figura imposible se percibe, representada de una forma objetiva al sujeto percibiente, pero se percibe su contradicción o imposibilidad estructural. Entonces es la actividad cognitiva la que induce en el sujeto una cierta sensación de incomodidad o tensión perceptiva, es como si la conciencia de la contradicción tratara de forzar algo así como una reorganización gestáltica de esa figura que, al no producirse, se traduce en tensión perceptiva. El sistema visual no está evolutivamente preparado para organizar estructuras imposibles, es como si temiera haber falseado la naturaleza, construida siempre por estructuras congruentes. Lo que pasa es que las figuras imposibles no son naturales, sino engañosamente construidas por el dibujante para introducir en ella una contradicción formada artificial e inducir a error al sistema perceptivo situándolo en perplejidad funcional. |
| Otras explicaciones del reconocimiento consideran que utilizamos hipótesis perceptivas: buscamos qué objeto produciría el patrón de estimulación que estamos experienciando. LA formación de estas hipótesis explicarían | Imágenes ambiguas / bi-estables: cada estado o interpretación estaría ligado a una hipótesis sobre el objeto. Figuras imposibles: las diferentes partes de la escena concuerdan con diferentes hipótesis sobre el objeto. |
{kind=link}
Want to create your own Flashcards for free with GoConqr? Learn more.