17721192
Description
Mind Map by SATIAGO OBANDO TRJILLO, updated more than 1 year ago
|
|
Created by SATIAGO OBANDO TRJILLO
about 5 years ago
|
|
DEFINICIÓN ROBOT
- TIPOS DE ROBOT
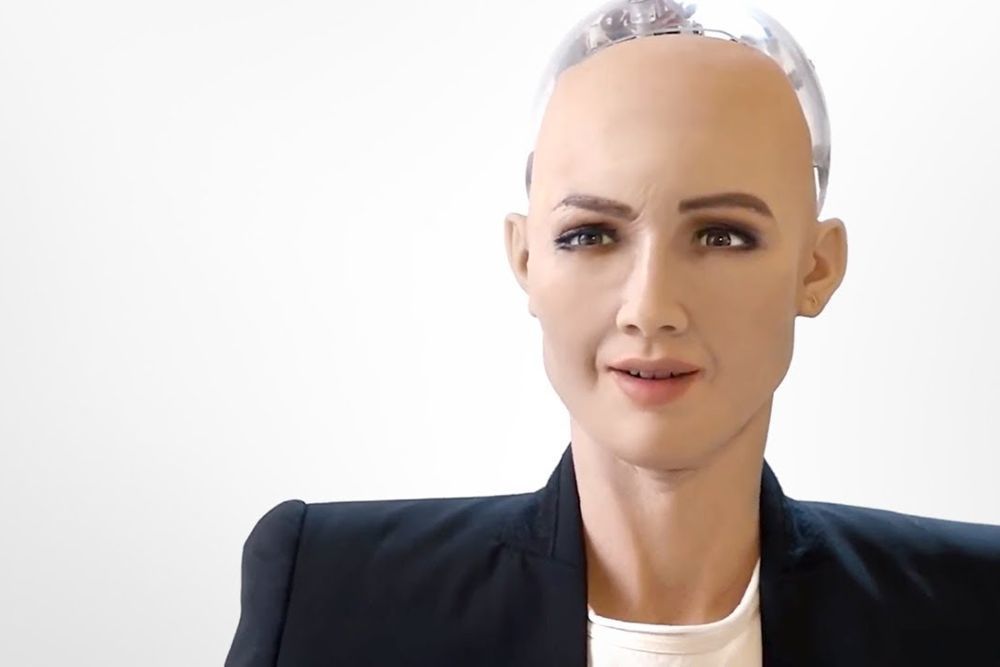
- Robots androides
- son aquellos que imitan movimientos y formas humanas. Son los
robots predilectos para el desarrollo de la inteligencia artificial o
autómatas. Ejemplo: ciborg.
- son aquellos que imitan movimientos y formas humanas. Son los
robots predilectos para el desarrollo de la inteligencia artificial o
autómatas. Ejemplo: ciborg.
- Telerobots
- son controlados remotamente por un ser
humano. Ejemplo: drones.
- son controlados remotamente por un ser
humano. Ejemplo: drones.
- Robots poliarticulados
- son multifacéticos y sus funciones dependen de su programación.
Todos los anteriores pueden ser clasificados como robots
poliarticulados si tienen más de un movimiento.
- son multifacéticos y sus funciones dependen de su programación.
Todos los anteriores pueden ser clasificados como robots
poliarticulados si tienen más de un movimiento.
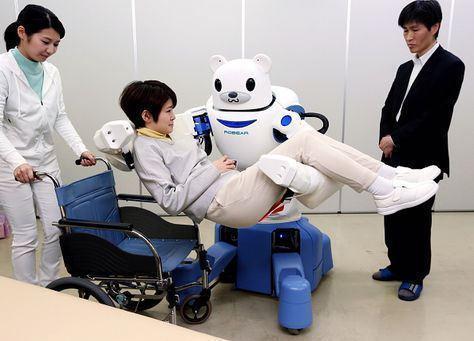
- Robots médicos
- son creados para el área de la salud.
Ejemplo: robots de rehabilitación y
almacenamiento de medicamentos.
- son creados para el área de la salud.
Ejemplo: robots de rehabilitación y
almacenamiento de medicamentos.
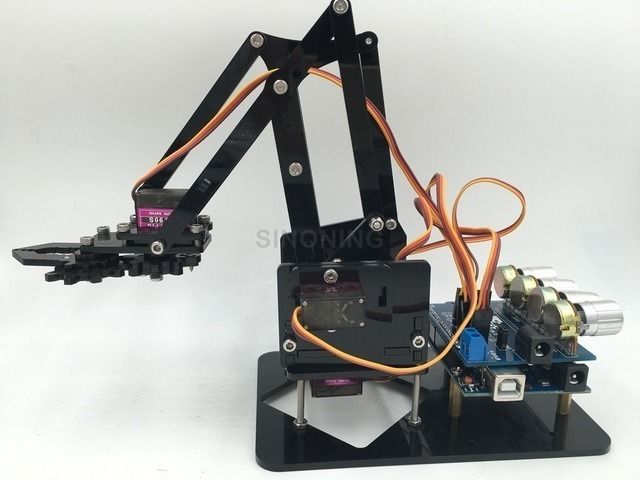
- Robots industriales
- son artilugios electrónicos y mecánicos fabricados para ayudar al hombre
en tareas repetitivas de manipulación y fabricación. Ejemplo: brazo
articulado industrial.
- son artilugios electrónicos y mecánicos fabricados para ayudar al hombre
en tareas repetitivas de manipulación y fabricación. Ejemplo: brazo
articulado industrial.
- Robots móviles
- tienen una gran capacidad de movimiento
y están equipado de sensores para evitar
choques. Ejemplo: rovers.
- tienen una gran capacidad de movimiento
y están equipado de sensores para evitar
choques. Ejemplo: rovers.
- Robots androides
- ¿QUE ES UN ROBOT?
- Robot es una máquina
electromecánica desarrollada para
ayudar en las tareas o las
actividades para los que fueron
programados.
- Robot es una máquina
electromecánica desarrollada para
ayudar en las tareas o las
actividades para los que fueron
programados.
- DISEÑO DEL ROBOT
- Rover
- son usados para explorar territorios de diferentes
naturaleza y se caracterizan por tener ruedas u orugas para
desplazarse por terrenos determinados. Ejemplo:
Astromóviles Rovers de la Nasa mandado para la
exploración de Marte.
- son usados para explorar territorios de diferentes
naturaleza y se caracterizan por tener ruedas u orugas para
desplazarse por terrenos determinados. Ejemplo:
Astromóviles Rovers de la Nasa mandado para la
exploración de Marte.
- Zoomórfico
- adopta para su locomoción la forma de un animal. En este
caso el robot humanoide también se consideraría un robot
zoomórfico.
- adopta para su locomoción la forma de un animal. En este
caso el robot humanoide también se consideraría un robot
zoomórfico.
- Bípedo estático
- se diferencia del dinámico por su falta de autonomía
para caminar. Necesita de procesar cada movimiento
siendo su movimiento más lento y más “robótico”.
- se diferencia del dinámico por su falta de autonomía
para caminar. Necesita de procesar cada movimiento
siendo su movimiento más lento y más “robótico”.
- Bípedo dinámico
- usa dos piernas para desplazarse y
lo hace con autonomía.
- usa dos piernas para desplazarse y
lo hace con autonomía.
- Segway
- usan dos ruedas paralelas para moverse. Las
ruedas son llamadas ruedas segway.
- usan dos ruedas paralelas para moverse. Las
ruedas son llamadas ruedas segway.
- Humanoide
- es el símil de los androides o cíborgs aunque no se determina el grado o tipo
de inteligencia de la máquina.
- es el símil de los androides o cíborgs aunque no se determina el grado o tipo
de inteligencia de la máquina.
- Rover
- CARACTERISTICAS
- Multifuncionalidad
- versatilidad para llevar a cabo distintas tareas, incluso aquéllas no previstas en principio
por los diseñadores, lo cual implica una considerable auto-adaptabilidad al entorno.
- versatilidad para llevar a cabo distintas tareas, incluso aquéllas no previstas en principio
por los diseñadores, lo cual implica una considerable auto-adaptabilidad al entorno.
- Programabilidad
- capacidad para modificar la tarea mediante el cambio de programa, que propicia su adaptación rápida y
económica a diferentes aplicaciones.
- capacidad para modificar la tarea mediante el cambio de programa, que propicia su adaptación rápida y
económica a diferentes aplicaciones.
- Multifuncionalidad
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.