698550
Description
Mind Map by davidlouisshaw1750, updated more than 1 year ago
|
|
Created by davidlouisshaw1750
almost 12 years ago
|
|
MECHANICS 1
- Particle moving in a straight line
- Kinematics (motion)
- Graphs
- Speed - time
- Distance Travelled =
area under graph
- Trapezium rule: Area
= average parallel
sides x height
- A = 1/2(a+b)h
- A = 1/2(a+b)h
- Objects meet when they have
the same distance travelled
- Trapezium rule: Area
= average parallel
sides x height
- Distance Travelled =
area under graph
- Distance - time
- Acceleration - time
- Speed - time
- Constant acceleraton
- Acceleration =
gradient of line
- In free fall:
Acceleration =
g (9.8 ms-2)
- Ignore air resistance
- Ignore air resistance
- SUVAT
- s=displacement
u=initial velocity
v = final velocity
a=acceleration
t=time
- v=u+at
s=(u+v)t/2
v^2=u^2+2as
s=ut+1/2at^2
s=vt-1/2at^2
- State which
way is positive
- s=displacement
u=initial velocity
v = final velocity
a=acceleration
t=time
- Acceleration =
gradient of line
- Graphs
- Dynamics (motion of bodies
under action of forces)
- Momentum, p
- = mass x velocity
- Collisions
- Conservation of momentum
- Momentum before = momentum after
- m1u1 + m2u2 = m1v1 + m1v1 + m2v2
- m1u1 + m2u2 = m1v1 + m1v1 + m2v2
- Momentum before = momentum after
- Conservation of momentum
- Impulse, I
- = force x time
- Impulse =
area under
force - time
graph
- Impulse =
area under
force - time
graph
- = final momentum -
initial momentum
- =mv-mu
- =mv-mu
- Newtons 3rd Law:
Objects exert equal
and opposite forces
(and so impulse) on
eachother
- = force x time
- = mass x velocity
- Newtons 2nd Law:
F = mass x
acceleration
- Momentum, p
- Kinematics (motion)
- Statics (bodies at rest with
forces in equilibrium)
- Additional
forces
- Weight, W
- = mass x g
- Due to gravity
acting on an
abject vertically
downwards
- = mass x g
- Tension, T
- Being pulled
along by a string
- Strings
- One string: Tension equal
- Two separate strings:
Tension different
- In-extensible
- Does not change length
so accelerations and
velocity of two particles
attached are equal
- Does not change length
so accelerations and
velocity of two particles
attached are equal
- Becomes slack
- No tension so
change in
acceleration, must
resolve again
- No tension so
change in
acceleration, must
resolve again
- One string: Tension equal
- Strings
- Being pulled
along by a string
- Thrust, T
- Being pushed
along by a rod
- Rods
- Uniform
- Weight acts at
the centre of
the rod
- Weight acts at
the centre of
the rod
- Light
- Adds no
weight to the
system
- Adds no
weight to the
system
- Straight and does
not bend, all
forces remain
perpendicular
- Uniform
- Rods
- Being pushed
along by a rod
- Normal reaction, R
- Perpendicular to the surface
in contact with the object
- Perpendicular to the surface
in contact with the object
- Friction, F
- F = uR
Annotations:
- u is Mue
- In limiting equilibrium (on the
point of movement), otherwise
equal to or less than
- Opposes
the motion
between two
rough
surfaces
- Smooth
- No
friction
- No
friction
- u = coefficient of
friction
- 0 < u <1
- 0 < u <1
- F = uR
- Weight, W
- Balanced, no overall motion, equal
and opposite in any direction
- Resolving Forces
- Resolve in the direction
of the acceleration
- Then resolve
perpendicular to this
- R(^): R - mg
- R(^): R - mg
- R(>): ma - uR
- Then resolve
perpendicular to this
- If static
- Resolve
horizontal and
vertical or up
plane and
perpendicular to
plane
- Resolve
horizontal and
vertical or up
plane and
perpendicular to
plane
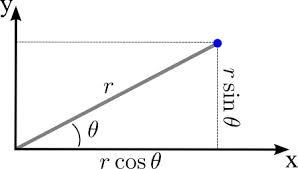
- At an angle
- Resolve to find
the component of
the force that acts
in the direction of
motion
- Component of F
= Fcos0
Annotations:
- 0 is Theta
- Component of F
= Fcos0
- Resolve to find
the component of
the force that acts
in the direction of
motion
- Resultant
Force
- Resolve force in
perpendicular
directions and then
apply pythagoras
- Resolve force in
perpendicular
directions and then
apply pythagoras
- Resolve in the direction
of the acceleration
- Additional
forces
- Moments
- Moment about a point
= Force x distance
- The sum of
moments
- State which way
is positive
(clockwise or
anticlockwise)
- Add up the moments
about a point
- M(P):
clockwise
moments -
anticlockwise
moments
- M(P):
clockwise
moments -
anticlockwise
moments
- State which way
is positive
(clockwise or
anticlockwise)
- In equilibrium
- In equilibrium the sum
of moments about any
point is zero
- M(P)
clockwise
moments =
anticlockwise
moments
- M(P)
clockwise
moments =
anticlockwise
moments
- Resultant
force in any
direction is
zero
- In equilibrium the sum
of moments about any
point is zero
- If tilting about a point, other
point support force = 0
- Moment about a point
= Force x distance
- Vectors (quantity with both
magnitude and direction)
- i, j notation
- i is a unit vector in the x-direction
j is a unit vector in the y-direction
- Add terms i and
j seperately
- i and j either bold
or underlined
- i is a unit vector in the x-direction
j is a unit vector in the y-direction
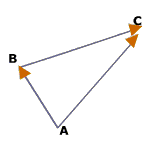
- Adding vectors
- Triangle law of addition
- AC = AB + BC
- AC = AB + BC
- Triangle law of addition
- Speed
- Calculated using
pythagoras for i and j
- Magnitude of
velocity vector
- Calculated using
pythagoras for i and j
- Length of line
= magnitude
- Arrow to show direction
- Arrow to show direction
- Equal
- Same magnitude
and direction
- Same magnitude
and direction
- Parrallel
- Same direction
- Same direction
- Vectors
involving
time
- r = r0 + vt
- r =
Position
vector at
time t
- r0 = Original
position vector
at time t=0
- v =
Velocity
vector
- r =
Position
vector at
time t
- Bearings
- From north clockwise
3 significant figures
before the decimal
- From north clockwise
3 significant figures
before the decimal
- Objects meet when they
have the same position
vector at the same time
- r = r0 + vt
- i, j notation
Media attachments
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.